美国大狗机器人中都有哪些传感器技术运用?
目前,智能无人系统种类多样,类型丰富。主要包括空中飞行的无人机、飞艇,地面上作业的机器人、自主地面车辆,水中的无人潜航器、水下机器人等三大类,还有空间站机器人、微型卫星、工业机械臂等众多旁支。目前,随着智能化无人系统的概念的普及、传感器和微型处理器技术的发展,智能无人系统已开始在社会生活中崭露头角,大大地推动了信息融合技术的研究和应用。美国研究人员开发的“大狗”(Big Dog)机器人便是其中一例。

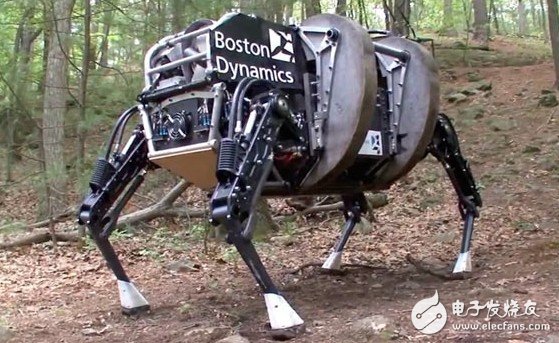
战场上的“大狗”机器人,资料图
在战场上,当美军在对坚固设防区实施有准备的进攻作战时,会动用侦察车、夜视器材、雷达、地面传感器等,必要时使用巷战的智能机器人、无人驾驶侦察机、高级电子传感器等。这款“大狗”机器人,便是由美国波士顿动力学工程公司专为美国军队设计研发的。研发成功后,到2015年,“大狗”机器人就已经进入了阿富汗地区开展试验,对机器人和士兵的协同作战功能进行了初步验证。
作为形似机械狗的四足机器人,“大狗”机器人体重和大型犬相当,在交通不便的地区能够为士兵运送弹药、食物和其他物品,能够行走和奔跑,还可跨越一定高度的障碍物。
大狗机器人身上的传感器类型
据了解,“大狗”机器人总共安装有约50个传感器,这些传感器能够用于监测车身的姿态与加速、关节的运动和力度、发动机的转速和内部机械装置的温度和液压。
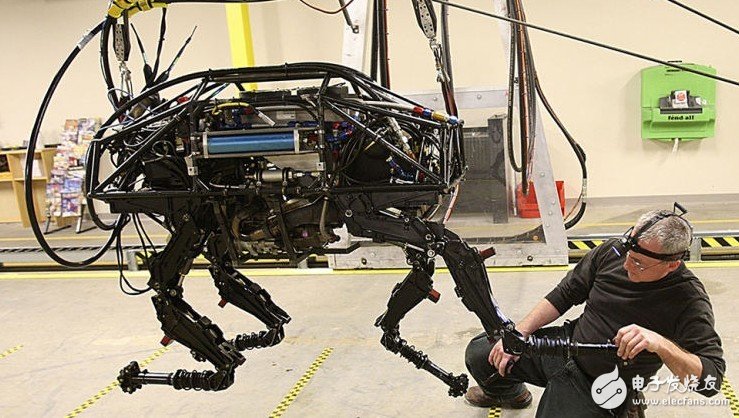
大狗机器人约装有50个传感器,资料图
“大狗”机器人头部立体摄像系统可提供精确的三维地形图,姿态传感器能提供当前的姿态和加速度,而压力、位置传感器则可反馈关节当前的运动状态和余量,温度、压力传感器还可以监测系统的健康状态。这样一来,多种传感器收集到的信息全部传递回“大脑”后,通过信息融合算法,经过类似人脑的处理过程,“大狗”便可以作出正确的指挥。
在实际操作中,“大狗”机器人最大的特点是,能够展示以多种运动方式与速度运动。“大狗”机器人通过控制它的四条腿,能够站起来,蹲下去,爬行,小跑,甚至快速跳跃前进。这一连串的动作,离不开它身体和腿部的智能化构造与感知系统。

钢架结构的“大狗”机器人,资料图
体内装有汽油发动机提供全身动力
具体来说,“大狗”的身体是一种钢架结构,内装有圆筒形汽油发动机,来为“大狗”的水压系统、电脑和惯性测算单元(IMU)提供动力。其中,惯性测算单元是机器狗的重要组成部分,它使用光纤激光陀螺仪和一组加速器跟踪机器狗的运动和位置。这些装置与四条腿一起发挥作用,就可以使它迈出准确的步伐。
为与人类行走的速度一致,它还采用了一种动态平衡小跑步态,即利用横向速度与加速度来保持平衡。通过一些惯性传感器与控制系统精确控制分配给各条腿的运动力量和地面反应力量,来优化它的负重能力。
大狗关节装有传感器,负责测量力量和位置,探测地势变化。资料图
腿部关节利用传感器探测地势变化
谈到大狗的腿部,它的腿由铝制成,每条腿有三个靠传动装置提供动力的关节,并有一个“弹性”关节,利用水压刺激器,电脑每秒可以重新将关节配置500次。关节上装有传感器,负责测量力量和位置,探测地势变化,电脑参照这些数据,结合从惯性测算单元获得的信息,确定四条腿应该是抬起还是放下,向右走还是向左走。通过调整关节的水压液体的流动,电脑可以将每一只爪子准确地放下。
例如,如果有一条腿比预期更早地碰到了地面,计算机就会认为它可能踩到了岩石或是山坡,然后“大狗”机器人就会相应地调节自己的步伐。而当遭到外界“骚扰”时,例如踹它一脚时,“大狗”的主动平衡性使其可以保持稳定。
