我国软体机器人形态学计算研究获进展
近日,中国科学院深圳先进技术研究院集成所神经工程中心研究员夏泽洋团队等在软体机器人形态学计算研究中取得新进展。相关研究结果以Optimal Design of Soft PneumATIc Bending Actuators Subjected to Design-Dependent PressURe Loads为题,发表在IEEE/ASME Transactions on Mechatronics上(2019, 24(6): 2873-2884 ),夏泽洋为论文通讯作者。
软体驱动器的设计方法可分为仿生设计方法和形态学计算方法。与需要大量实验的仿生设计方法相比,形态学计算方法可以根据个性化的设计需求生成创新的结构。现有的形态学计算方法一般基于拓扑优化方法实现,不能直接应用于弯曲型软体气动驱动器(SPBA)设计,因为SPBA的形态通常还与所承受的设计有关的压力载荷相关,其施加的位置取决于具体的内部腔体结构。为此,研究人员提出一种基于双向渐进拓扑结构优化法的SPBAs形态学计算框架,以解决软体机器人形态学计算及优化问题。该优化设计框架基于数值拓扑优化方法建立,并将SPBA视为顺应性机构,设定的优化目标是实现特定加载压力下的最大弯曲变形和结构刚度。在有限元分析中,设计域中的每个元素根据灵敏度设置为实体或空腔,灵敏度用目标函数对设计变量的导数近似逼近。迭代优化时,定义压力作用于可移动的实体边界表面。通过上述优化得到的驱动器拓扑结构结果制作样机,在无负载实验中对其性能进行评估。同时,为验证该方法的有效性和实用性,设计具有和不具有应变限制层的矩形实体和圆柱形SPBA,分别得到使其实现最大弯曲运动的优化结果。该研究从理论分析角度验证了广泛应用的气动网格式(PneuNets)软体驱动器的结构合理性。同时,该方法可以改变当前软体驱动器基于经验的试错式结构设计模式,使SPBA设计面向特定的个性化运动需求,并使研究能够应用于需要结合结构约束和设计需求的应用领域,如通过更改优化目标函数,可创建用于满足手部康复运动的非对称结构的SPBA。形态学计算是软体机器人设计亟待解决的关键问题。该研究建立了一种基于拓扑优化的软体机器人形态学计算方法,是首次尝试使用数值计算的方法从形态学计算的角度来设计软体驱动器。基于拓扑优化方法的形态学计算框架,为满足特定功能任务的软体机器人的个性化形态设计提供了一种解决方法。
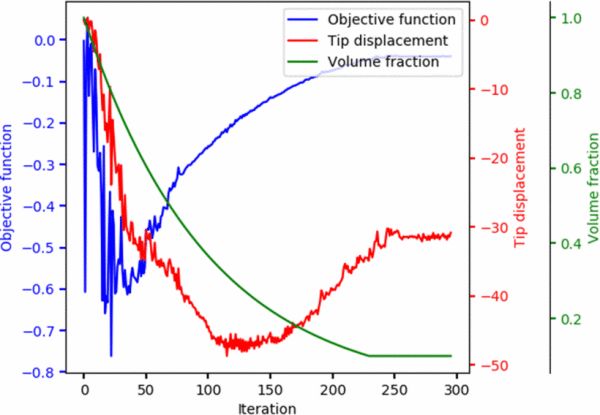
目标函数、末端点竖直位移和体积分数的演化过程
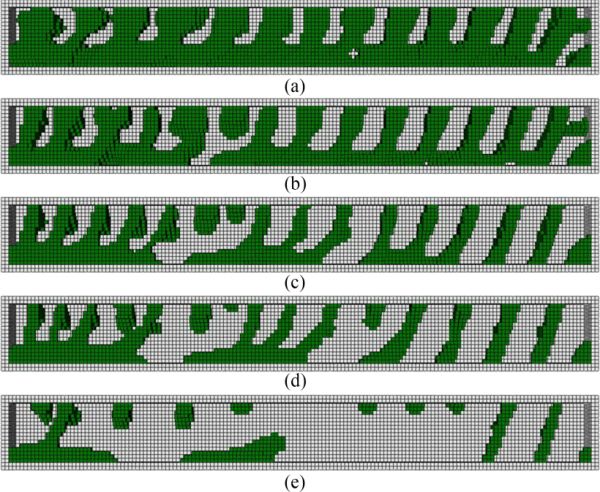
基于双向渐进拓扑结构优化法的SPBAs形态学计算的拓扑结构的演化过程示例
