“助盲智能眼镜”配备视觉、图像传感器 具备三维感知功能
传感器专家网6月11日报道,近日,据中国航天科工集团四院十七所消息,该所利用航天技术最新研制一款应用双目立体视觉技术的“助盲行智能眼镜”,配备视觉传感器和图像传感器,具备三维感知和障碍物检测功能,有为盲人导航的功能,其工程样机的目标定位精度达到5厘米,可让困扰盲人出行的问题迎刃而解。
“助盲行智能眼镜”应用航天技术研制
盲道设计不合理、盲道被占用、公交车出租车拒载导盲犬等影响盲人出行的新闻经常被报道,因此这款“助盲行智能眼镜”的研制,保证了盲人的出行安全。
据负责人介绍,中国航天科工四院十七所导航与光电事业部长期从事惯性导航系统和光电产品的研发设计,具有深厚技术积累,由此萌发出利用航天惯性导航和光电技术研制盲人导航辅具产品的想法。“随着机器视觉技术的逐渐成熟,尤其是立体视觉三维环境感知技术,为盲人解决出行难题,实现或替代部分生理视觉功能提供了解决方案。”
如何满足视觉助盲的需求?“助盲行智能眼镜”项目团队决定采用双目立体视觉方案。该方案是模拟人的双眼,基于视差原理获取深度信息,具有高精度三维环境测量能力、环境适应性强、传感器成本低等特点。
通过技术攻关,项目团队突破双CMOS图像传感器同步驱动成像、FPGA实时双目立体匹配、障碍物识别检测等一系列关键技术,研制成功“助盲行智能眼镜”产品原理样机,实现前方场景6米范围内的3D测量,每秒产生200万个3D点,障碍物定位精度达到厘米级,识别准确率达到99%,能有效为视障者提供周围环境信息。
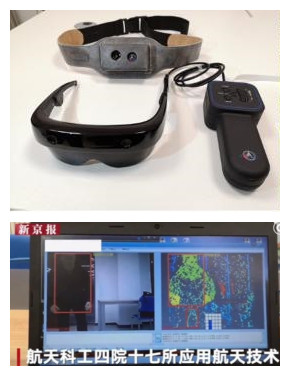
针对原理样机还存在体积大、重量重等无法实用的问题,项目团队又持续改进优化和不断迭代升级,最终研制成功“助盲行智能眼镜”工程样机,它由眼镜、控制器和腰带3部分组成,基本具备为盲人导航的功能。
“助盲行智能眼镜”工程样机产品能够识别并提示障碍物、坑洼、盲道、二维码图案物品等目标,定位精度达到5厘米,佩戴组件重量70克,续航时间超过4小时。项目团队设计师韩新建补充称,“助盲行智能眼镜”关键技术还可以拓展到机器人导航、汽车自主驾驶、VR/AR(虚拟现实/增强现实)等领域,应用前景广阔。

志愿者体验“助盲行智能眼镜”
据了解,为检验“助盲行智能眼镜”使用效果,项目团队还招募盲人志愿者开展体验活动,30位盲人体验后表示,该款智能眼镜对障碍物分布及其移动情况的感知非常灵敏,希望这款眼镜产品能尽快量产上市。
