3D成像运用的最新传感器技术
无论系统集成商选择使用现成的组件构建系统还是购买集成的3D产品,获取3D图像都需要特定的技术。新颖的图像传感器和激光器就是两种极具代表性的技术,本文旨在了解3D视觉技术中的一些最新基础组件以及应用的最新技术。
图像传感器
作为所有成像设备的核心,图像传感器检测光并将其转换为电信号以创建图像。在大多数应用中,部署现成的传感器就足够了。但是,在某些情况下,公司可能会为自己的产品或第三方产品专门开发3D图像传感器。
SICK悠久的传统是将专有图像传感器用于其高速3D相机。在其最新一代产品中,Ranger3系列提供了紧凑型3D相机,该相机使用SICK的最新CMOS图像传感器M30(图1)。M30图像传感器提供片内数据检测(称为ROCC技术,代表快速的片内计算,并在2560 x 200像素分辨率下达到30 kHz,输出带宽小于1 Gbps.

图1:SICK的M30 CMOS图像传感器提供称为ROCC技术的片上数据检测(快速片上计算),并用于该公司的Ranger3 3D相机系列。
例如,Ranger3-60摄像机使用专有的CMOS图像传感器,并且可以处理其全帧成像器(2560 x 832),以创建一个3D配置文件,其7kHz时的值为2560.在Ranger E和Ranger D相机系列以及Ruler E和ScanningRuler设备中都可以找到以前的SICK CMOS传感器(M15)。
3D Vision战略产品经理Markus Weinhofer表示:“使用专有的传感器技术存在数项优势,其中一项要实现公司独立的战略目标。“它还为我们提供了拥有内部核心技术的竞争优势,尤其是在减少片上数据方面。使用此功能,可以轻松进行调整和自定义。”
而加拿大公司AIRY3D则在3D图像传感器设计中采用了一种经济的方法。其DEPTHIQ平台使用光学编码器(透射衍射掩模)将光的相位和方向嵌入像素强度数据中,从而生成集成了2D图像和深度数据的唯一数据集。专有算法提取深度数据并还原原始2D图像数据,以准备用于开发人员的2D图像信号处理管道,并将提取的深度数据馈入DEPTHIQ图像深度处理 软件管道,该管道输出深度图(图2)。
根据该公司的说法,DEPTHIQ提供了单传感器3D成像和2D传感器的替代品 ,而无需更改相机模块或镜头。此外,该设计与传感器无关,可以针对任何给定的CMOS图像传感器规格进行定制。
“传统的深度解决方案部署起来既困难又昂贵,因为它们需要消耗大量功率并大大增加平台上的总体占地面积。所有这些问题都阻碍了视觉系统广泛采用深度。”战略营销副总裁Paul Gallagher说。“ AIRY3D方法易于部署,因为它适合现有的占地面积,并且不需要任何特殊的照明。它非常节能,在处理深度流时,它的轻量级处理仅需要几个行缓冲区。”
他补充说:“ AIRY3D的技术将能够对需要或需要深度但由于传统深度的成本,大小或功耗要求而无法部署深度解决方案的众多应用程序进行深度部署。”
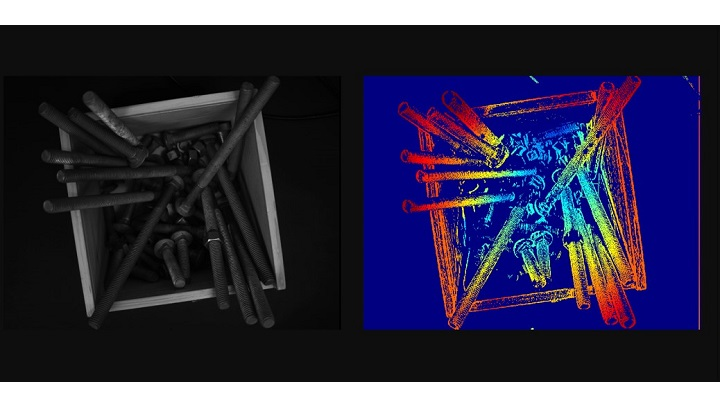
图2:AIRY3D的与传感器无关的DEPTHIQ平台无需更改相机模块或镜头,并提供单传感器3D成像和2D传感器的替代产品。
旨在使准确,快速3D获取移动物体的,来自斯洛伐克的公司Photoneo镶嵌 CMOS图像传感器(图3)采用类似于拜耳滤光片马赛克的工作原理。其中,每个颜色编码的像素具有独特的作用在最后的去拜耳输出中。该传感器部署在公司的3D产品线中,可以从传感器的单次拍摄中捕获移动物体。该传感器由[机密]数量的超像素块组成,这些像素进一步细分为子像素。每个子像素都可以通过定义的唯一调制信号/图案进行控制-指内部像素的电子调制,以控制像素何时接收光,何时不接收光,因此称为马赛克快门或矩阵快门CMOS传感器。
曝光后,原始数据被去马赛克以收集一组唯一编码的虚拟图像(与每个超像素的子像素数量相关的数量),这与通过调制投影捕获多个图像相反。这意味着与投影场(发射器)相反,在传感器上完成像素调制(打开或关闭)。由于可以完全控制像素调制功能,因此可以使用相同的顺序结构光算法和类似的信息,但是使用一帧且分辨率稍低。
“有几种技术使用多个帧来计算最终图像。但是,当捕获运动物体时,它们面临着与结构光技术相同的问题:在不同的情况下捕获单个图像,导致最终输出失真。” Photoneo首席技术官Tomas Kovacovsky说。“ Photoneo的图像传感器可以在一帧中捕获场景。有些传感器能够调制像素,但是这种方法需要以更精细的方式对其进行调制。”
他补充说:“最重要的是,超像素中的每个子像素都被独立调制。”
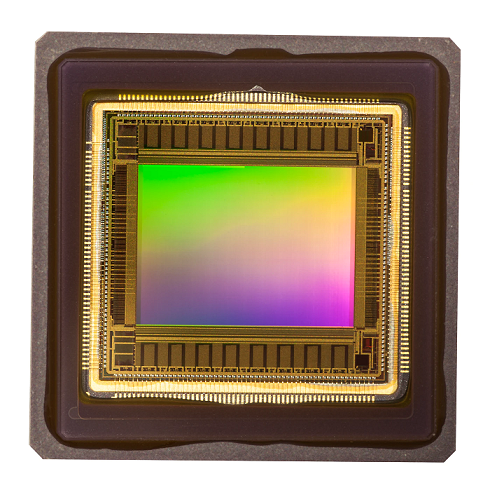
图3:Photoneo的镶嵌式CMOS图像传感器以快速,准确地采集运动物体为目标,其工作方式与拜耳滤波器相似,在拜耳滤波器中,每个彩色编码像素在最终的去拜耳输出中均具有独特的作用。
还有知名传感器企业安森美半导体开发的背面照明的CMOS图像传感器——0430传感器,仅有1 / 3.2英寸,全分辨率下可达到120 fps.该传感器可通过该公司的Super Depth技术从单个设备捕获彩色图像和同时的深度图。传感器,滤色器阵列和微透镜中的技术创建了同时包含图像和深度数据的数据流。据安森美半导体公司称,这些数据通过一种算法进行组合,以提供30fps的视频流和相机1 m之内的任何物体的深度图。此外,该设备还可以从单个传感器以30 fps的速度同时进行彩色成像和深度数据。
结构线激光器
没有结构化线激光器,就不可能利用3D三角测量技术来获取3D图像,因为三角测量需要使用投射到物体表面的激光和捕获该线在物体表面反射的相机。通过三角剖分,可以计算每个表面点的距离,以获得对象形状的3D轮廓或轮廓。基于激光的3D技术需要许多单独的图像,每个图像仅包含要检查的对象的一行,才能创建需要检查的对象或特征的完整3D图像。
部署此类技术可能意味着要使用预打包的系统,例如AT自动化技术公司,康耐视, Keyence,LMI Technologies, Micro-Epsilon等提供的产品。
3D三角剖分还可能意味着使用现成的组件构建系统,例如工业区域扫描相机和结构化线激光器。Integro Technologies公司首席视觉系统架构师David Dechow建议使用正确的软件,几乎任何工业相机都可以成为使用三角测量的3D相机。
“使用激光三角测量的专业3D成像组件是极其复杂的机器视觉系统,具有先进的传感器,照明,电子设备以及固件或软件。但是,从最根本的意义上讲,结构化的激光线或光成像片可以作为通用应用来实现。” “当然,成功执行此操作需要正确的激光组件,摄像机图像传感器和适当的支持软件。”
许多机器视觉库都支持获取单个帧,这些帧可以从激光三角测量图像组合成3D图像。其中包括来自MVTec的HALCON ;Euresys的Easy3D,Matrox Imaging的Matrox成像库,Stemmer Imaging的Common Vision Blox等。
根据Dechow的说法,所有这些产品和其他产品都具有允许集成商使用单独的相机和激光器创建3D表示的算法。
“构建自己的3D激光三角测量系统首先要找到合适的现成激光器,而不是在家居装饰商店中找到的激光器,而是要找到可散斑的可聚焦激光器,该激光器在整个领域内都是一致的相机传感器的视角”,Dechow说。
为此,Coherent提供了可配置的Stingray机器视觉激光器(图4),客户可以选择激光输出功率,线扇角度,波长,电缆和连接器选项例如RS-232和自定义对焦工作距离。
“影响3D应用程序成功的最重要指标是预计的礼帽线的均匀性和直线度,” Coherent产品经理Daniel Callen说。“黄貂鱼激光器集成了鲍威尔透镜,该透镜是具有非球面轮廓的圆柱透镜。与传统的柱面透镜相比,鲍威尔透镜在这两个关键参数上均具有更好的性能。”
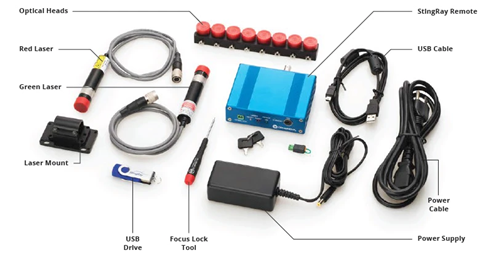
图4:Coherent提供的工具包允许最终用户使用结构化光源快速评估3D机器视觉应用。
波长代表选择三角测量激光器时要考虑的另一个重要特征。不同的材料会响应不同的波长,从激光的角度来看,选择错误的激光会影响成像。要考虑的另一个因素是需要强大的激光器。三角测量需要物体上有足够的光才能在很大程度上克服环境光,还需要足够的光以反射可能会吸收光的表面。Dechow解释说,激光器需要产生一个反射,该反射可以在传感器中以应用所需的成像速率成像。
例如,ProPhotonix提供用于3D成像应用的可配置激光器,例如3D PRO激光器(图5),这些激光器具有多种尺寸,可调节的聚焦选项以及董事总经理杰里米·莱恩(Jeremy Lane)表示,波长,功率和均匀度范围广。

图5:ProPhotonix的3D PRO激光器具有多种尺寸,可调焦距选项以及各种波长,功率和均匀度级别。
其他许多激光公司也开发了专门用于3D成像的结构化激光,包括Osela,美国Laser Components和Z-激光。这些制造商开发了具有各种功能(例如不同的波长和线宽)的激光器。
Osela首席执行官Nicolas Cadieux表示,高特性和针对特定应用的优化激光结构光解决方案是满足对机器视觉系统不断增长的需求的关键。
“专为均匀像素照明,景深优化以及激光安全认证知识而设计的激光束整形技术极大地改善了我们客户构建的3D视觉系统的性能。”
在部署3D机器视觉系统时,系统集成商有很多选择。预包装的产品提供了现成的3D功能,而诸如为3D设计的新型图像传感器,单独的结构化线激光器和第三方软件包等组件则提供了从头构建系统的能力。有选择总是好事。
来源:vision-systems
作者:James Carroll
编译:枭枭
