麻省理工演示可精细操纵电缆的GelSight机械臂
早在 2011 年的时候,外媒就已经报道过麻省理工学院(MIT)开发的能够让机器人理解机械臂“指尖”动作的一套机器人系统。现在,该校计算机科学与人工智能实验室(CSAIL)又将这项技术用到了电缆的精细操纵上。研究团队将这套系统的基础版本称作 GelSight,其中包含了一块透明的合成橡胶板,并在另一侧涂有一层金属漆。
(来自:MIT CSAIL)
当涂漆的一面压在物体表面时,它就会产生相应的变形。然后透过未上漆的另一面,就可以看到表面的细微轮廓。
油漆对于标准化表面的光学质量必不可少,因而该系统不会被多种颜色或材料所混淆。
借助成像算法,系统能够将这些轮廓转为 3D 图像,能够捕捉到深度小于 1 微米、宽度小于 2 微米的细节。
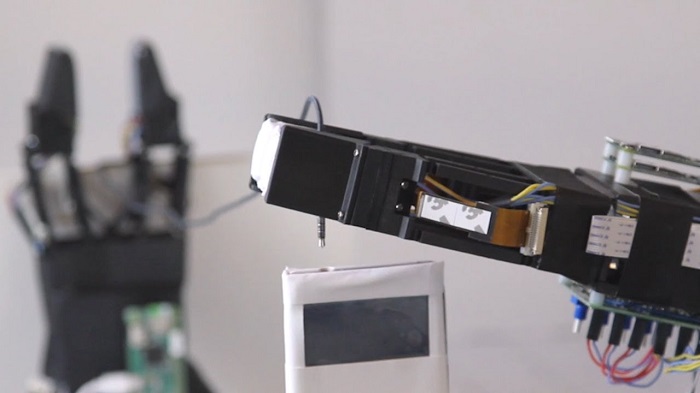
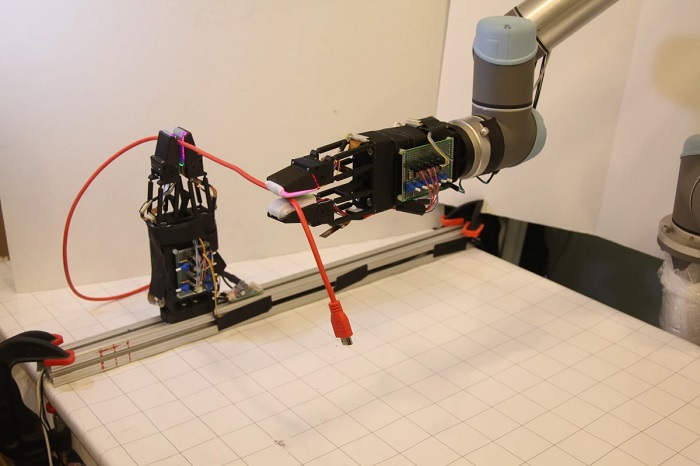
在博士生 Yu She 的带领下,MIT 研究团队将这套技术运用到了两指机器人的握爪指垫上。
当夹具紧紧夹在电缆上时,系统既可以感知电缆在每个垫片上的位置,又可以通过监视摩擦力,得知电缆在其间的穿行速度。
借助这些数据,计算机可在三维空间中连续调整夹具的“姿势”与握力。比如先让电缆居中放置在垫片之间保持稳固的握持,而后随着夹具的移动而让它在两个垫片之间滑动。
目前这套系统已能够轻松抓住耳机线,并使之沿着电缆的长度而滑动,直到检测末端的插头、调节插头的朝向、最终将之插入目标设备的耳机插孔。
展望未来,MIT 研究团队希望 GelSight 能够找到更广泛的应用场景,比如在汽车装配线上安装线缆、甚至对患者进行高精度的手术缝合。
