科学家开发出可在其他星球上挖掘隧道的机器人
当人类继续探索其他星球时,不仅想知道它们表面的情况,还想知道这些星球地表之下的情况。这就是“鼹鼠”机器人的作用--它是一个能自主在地面上穿行的机器人。Mole-bot由韩国高级科学技术研究院(KAIST)开发,它的灵感来自欧洲鼹鼠和非洲鼹鼠。后者通过用其强壮的门牙咬住地面挖掘隧道,而前者则用其强大的前肢将脱落的土壤推回自己身后。
鼹鼠机器人的前面没有真正鼹鼠一样的牙齿,而是有一种类似螺旋桨的可伸缩钻头。当它旋转着向土壤中研磨时,它的折叠锯齿状刀片会向外延伸,挖出一条比机器人圆柱形身体更宽的隧道。接下来,机器人没有使用前肢,而是使用位于钻头两侧的两个可延伸的铰链式金属法兰,将松散的土壤从其前端推回。钻头和法兰盘交替运作,这样它们就不会互相妨碍。

后部的三条类似于毛毛虫的履带推动 "鼹鼠 "机器人前进,再加上其中部的一个可旋转的机械 "腰部",使其能够在挖掘隧道时改变方向。它能够利用3D同步定位和映射(SLAM)技术进行定位,该技术能够持续跟踪机器人相对于地球磁场的位置。
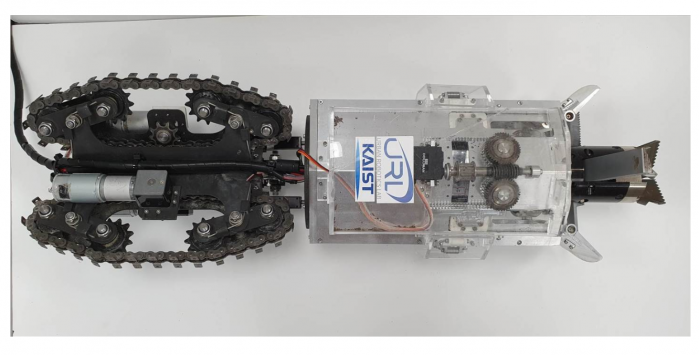
除了在其他星球上的使用,"鼹鼠 "机器人还可能被利用在采矿业。与现有的钻井系统相比,据称它的成本更低,劳动强度更低,而且更环保,因为它不需要使用泥浆化合物来清理碎片。目前的原型机是该机器人的第三个版本,长84厘米,宽25厘米,重26公斤。
