受蟑螂启发的新一代机器人虽然小巧但功能强大
这个小不点机器人还不能爬上水管,但它能跑、能跳、能背负重物,还能随意转动。这款名为HAMR-JR的微型机器人由哈佛大学约翰-A-保尔森工程与应用科学学院(SEAS)和哈佛Wyss生物启发工程研究所的研究人员开发,是哈佛大学之前受蟑螂启发而开发的微型机器人HAMR的小尺寸版本。
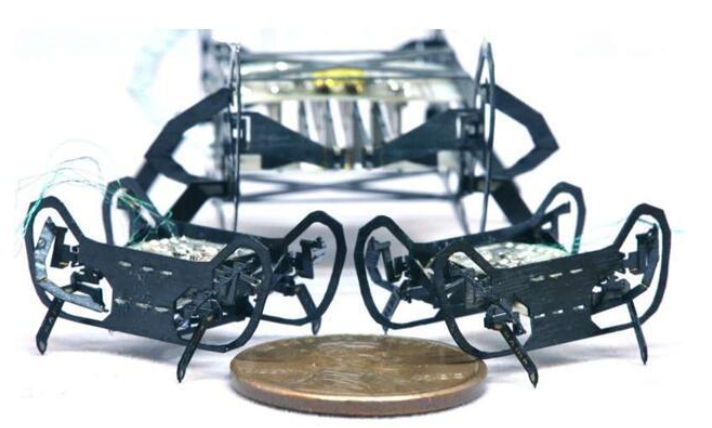
HAMR-JR大约一个硬币大小,具有大尺寸版本的所有功能,使其成为迄今为止最灵巧的微型机器人之一。
"大多数这种尺寸的机器人都相当简单,只能表现出基本的机动性,"前SEAS和Wyss博士后研究员、论文第一作者Kaushik Jayaram说。"我们已经证明,可以不必为了尺寸而妥协于灵巧性或控制力。"Jayaram目前是科罗拉多大学博尔德分校的助理教授。
这项研究在本周举行的国际机器人与自动化大会(ICRA 2020)上进行了展示。
这项研究的主要方向是,用于制造HAMR和其他微型机器人(包括RoboBee)的弹出式制造工艺是否可以用于制造多种尺寸规格的机器人,涵盖小型手术机器人到大型工业机器人。
PC-MEMS(印制电路微电子机械系统的简称)是一种制造工艺,在这种制造工艺中,机器人的部件被蚀刻在2-D片上,然后在其3-D结构中弹出。为了制造HAMR-JR,研究人员简单地将机器人的2-D片材设计与执行器和板载电路一起缩小,重新制造出一个具有相同功能的小型机器人。
"这项工作的奇妙之处在于,我们不需要改变之前的设计,"Jayaram说。"我们证明了这种工艺基本上可以应用到各种尺寸的设备上。"
HAMR-JR的体长为2.25厘米,重量约为0.3克,仅相当于一个硬币的重量。它可以每秒运行约14个体长,不仅是最小的微型机器人之一,也是最快的微型机器人之一。
缩小尺寸确实会改变一些关于步长和关节刚度等方面的原理,因此研究人员还开发了一个模型,可以根据目标尺寸预测运动指标,如跑步速度、脚力和有效载荷。然后,该模型可以用来设计出符合要求规格的系统。
"这个新的机器人表明,我们对使用基于折叠的组装方法来缩小复杂机器人的理论和实践方面有了很好的把握,"合著者、SEAS工程与应用科学学院Charles River教授、Wyss核心教师成员Robert Wood说。
