科学家设计出充满咖啡渣的足式机器人
据外媒New Atlas报道,足式机器人的主要用途之一是探索灾难现场。不过,在这些废墟上行走时,需要它们快速移动且不会摔倒。这就是加州大学圣地亚哥分校的科学家们新设计出装满咖啡渣的足式机器人的原因。
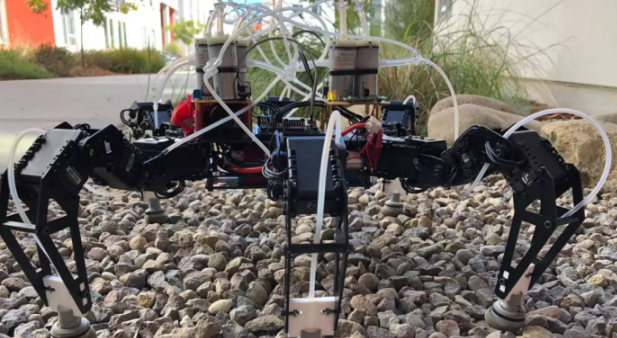
这款足式机器人的每只脚都是由一个柔软的乳胶球组成,里面装满了松散的干咖啡渣。除了咖啡,每只脚还包含一个植物根的内部支撑结构。当在空中移动时,脚部保持柔软和湿润。然而,当脚与地面相遇并符合地面不规则的轮廓时,它们就会变硬。这要归功于一种叫做 "粒状卡住 "的现象,即咖啡渣在受到压力时,会暂时性地卡在一起。
因此,每只脚在不平坦的地面上,每一次落地时,都能形成一个僵硬的、定制的抓地力。这可以是被动地完成,因为机器人的重量会把咖啡渣卡在一起,也可以是主动地完成,即通过真空泵将空气从球体中吸出,从而卡住它们。
当该机器人在木屑或鹅卵石上行走时,它的移动速度比使用普通刚性脚时快40%。部分原因是,咖啡脚使机器人的附属物沉入木屑/鹅卵石中的深度平均降低了62%,并减少了98%的拉力。
它们还使机器人在不平坦和平坦的表面上都有更好的抓地力。研究人员发现,主动干扰系统在前者上的效果最好,而被动系统则更适合后者。现在的计划是在脚部的底部加装传感器,在脚部接触地面之前确定地面的特性。
这并不是我们第一次听说将咖啡渣纳入机器人设备中。它们曾被应用在一个名为Versaball的抓取装置中,此外,麻省理工学院还将它们用于抓取物体的机器人“象鼻”。
