一文读懂汽车感知传感器
汽车电子控制系统普遍遵循感知→控制→执行的工作流程。
传感器作为感知单元获取系统的工作状态,控制单元处理传感器信号并计算输出控制指令,最终由执行单元完成相应动作。
以电动助力转向系统(EPS)为例, 车辆运行过程中, 方向盘扭矩转角传感器监测方向盘转角及扭矩信息,轮速传感器监测车轮转速, 控制器(ECU)通过 CAN总线实时获取传感器信号, 并根据特定逻辑实时处理信号,计算得到一个理想的助力力矩, 最后通过 MOSFET 控制电机,实现助力效果。
汽车动力、底盘、车身、电气四大系统中,绝大部分的电子控制具备类似的工作原理,从感知、控制到执行环节,半导体器件无处不在,包括感知系统的传感器,控制环节的微控制器(MCU)、通信芯片(CAN/LIN等)、模数转换器(A/D),执行环节的功率器件(MOSFET、 IGBT、 DCDC)等。其中传感器更是汽车的机会所在。

汽车传感器可分为车辆感知、 环境感知两大类。 动力、底盘、车身及电子电气系统中的传感器属于车辆感知范畴, ADAS以及无人驾驶系统中引入的车载摄像头、毫米波雷达、激光雷达等属于环境感知范畴。
本文重点讲解汽车感知传感器。
按照工作原理,汽车传感器主要可分为 MEMS、磁、化学、温度四大类,我们统计传统汽油车上 MEMS 传感器超 50 个, 磁传感器超过 30 个,合计占比约90%。
MEMS 传感器
MEMS 传感器(Micro-Electro-Mechanical System)是一个将微型机械结构、微型传感器、微型执行器、信号处理和控制电路以及接口、通信和电源模块都集成于芯片上的微机电系统,在汽车上广泛应用于压力类以及运动类传感器。
根据 Bosch 估计,目前一辆汽车上安装有超过 50 个 MEMS 传感器, 我们估计单车价值量 500-1000 元。 应用较多的是压力传感器、加速度计、陀螺仪及磁力计等惯导系统传感器。 这些产品虽都采用微机电系统封装,但对应原理各不相同。
压力 MEMS:大多基于硅的压阻效应,压力作用于硅薄膜引起 4个电阻应变片电阻的变化,惠斯顿电桥输出与压力成正比的电压信号,适用于中低压场景,如发动机进气歧管、胎压检测系统TPMS、真空度、油箱压力等。中、高压场合多采用陶瓷电容的技术路线。
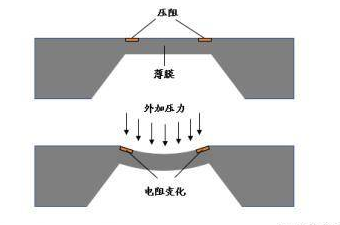
图:硅压阻式压力 MEMS 工作原理
加速度 MEMS:基于牛顿第二定律,通过在加速过程中对质量块对应惯性力的测量来获得加速度值。 采用电容式、压阻式或热对流原理,分为低 g (重力加速度)和高g 两大类,区别在于测量的加速度范围不同, ±2g~±24g 等低 / 中 g 传感器用于主动悬架、ESP、侧翻、导航等非安全类系统, ±200g 等高 g传感器用于气囊等安全系统。
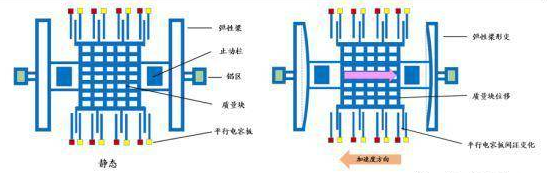
图:电容式 MEMS 加速度计工作原理
角速度 MEMS/ 陀螺仪: 基于 Coriolis 力原理:一个物体在坐标轴中直线移动时,假设坐标系旋转,物体会受到一个垂直的力和垂直方向的加速度。MEMS 陀螺仪通常安装两个方向的可移动电容板,径向电容板加振荡电压迫使物体作径向运动,而当旋转时,横向电容板能够测量由于横向 Coriolis运动带来的电容变化,从而计算出角速度。最多可测量 x/y/z 三轴角速度,用于侧翻、车身稳定控制系统、惯性导航 IMU 等。
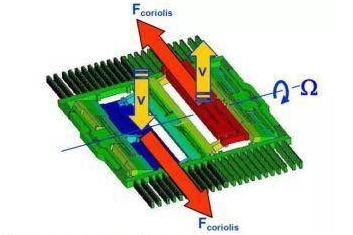
图:MEMS 陀螺仪工作原理
磁力计:运动过程中地磁场改变磁力计主磁场方向,从而引起导电薄膜内磁场方向与电流夹角值变化,而夹角的变化与电阻值呈线性关系,通过换算可以确定与地磁场的相对位臵来进行定位。
磁力计主要与加速度计、陀螺仪一起,应用于惯性导航系统中(Dead Reckoning), 用于在 GPS信号缺失时,通过测量与地磁场的相对位臵来判断汽车的航向角及姿态。磁力计基于磁效应,采用 MEMS 工艺,由于霍尔效应灵敏度难以达到要求,普遍应用 AMR来感应地磁场。
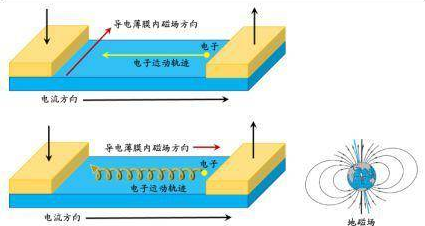
图:MEMS AMR 磁力计工作原理
磁传感器
目前磁传感器有四代技术, 分别为霍尔效应、 AMR (Anisotropic magnetoresistance effect)、 GMR (Giantmagnetoresistance effect)、 TMR (Tunnel magnetoresistance effect),主要用于测量运动量,具体产品形式为速度传感器、 线性及角度位臵传感器、电流传感器等。
霍尔传感器: 目前汽车上应用的磁传感器大多基于霍尔效应的原理,简称为霍尔传感器。 主要用来测量运动量,如位臵、角度、速度、电流等,分为霍尔开关、位臵霍尔(线性 / 角度 /3D)、转速霍尔、电流霍尔及导航系统磁力计等类型。
霍尔传感器的测量原理——霍尔效应是指当电流通过磁场中的霍尔元件时,磁场会对霍尔元件中的电子产生垂直于电子运动方向的作用力,使得在垂直导体与磁感线方向正负电荷聚集,形成霍尔电压。
霍尔传感器的测量原理是运动切割磁感线引起磁场以及感应电流的变化,最终导致霍尔电压的变化,依据该变化来探测目标的运动状态变化。
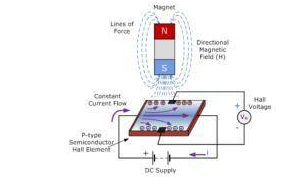
图:霍尔效应原理图
xMR 磁阻:AMR、 GMR、 TMR 均基于磁阻原理,作为下一代磁传感器技术,凭借性能优势,渗透率正日益提升。目前 AMR/GMR 技术已经在轮速、方向盘转角 / 扭矩、电子节气门位臵、曲轴和凸轮轴转速等传感器领域得到规模化应用。
TMR 传感器的性能提升十分显着,利用磁性多层膜材料的隧道磁电阻效应,与霍尔元件、 AMR、 GMR 相比, 优势突出:
第一, 温度性能好,前端模块电镀了纳米厚度的氧化层, 而不是半导体;
第二, 电流功耗小,从霍尔的 5-20mA 减少到 μA 级别;
第三, 敏感性很强,规模上量后成本更低, 霍尔元件需要用钕铁硼等强力磁铁。
TMR 传感器将凭借突出的产品性能, 在高要求应用场景替代霍尔传感器:
1、 角度、转速、位臵类传感器: 包括 BLDC 转子位臵、方向盘转角、轮速、节气门位臵、曲轴 / 凸轮轴角度等功能安全等级要求非常高的应用场合。
2、 液位传感器: TMR 取代干簧管, 干簧管容易破裂、 一致性差、 成本较高, TMR 灵敏度高、成本低、克服破碎问题。
化学传感器
氧传感器:汽车中一般设臵前氧和后氧两个氧传感器。前氧传感器检测混合排气中氧的含量, 并反馈给发动机 ECU修正喷油量,控制混合气的空燃比在理论值附近,使三元催化达到效率最高。后氧传感器检测催化转化后混合气体中的氧含量,用来判定三元催化转化器是否失效。
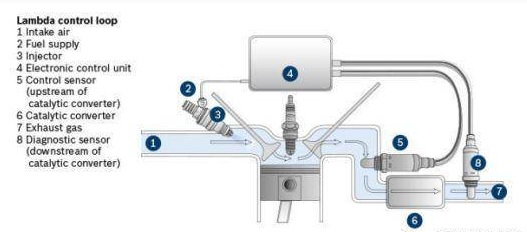
图:氧传感器工作原理
氮氧化物传感器:氮氧化物传感器主要应用在柴油车后处理 SCR 系统(Selective Catalytic Reduction System),用于检测尾气催化还原之后NOx 的含量是否满足排放要求。
温度传感器
汽车上普遍用热敏电阻来测量温度,可分为 PTC 和 NTC 两类。
NTC: 电阻随温度升高而降低,主要用来测量气体、液体、环境温度,包括冷却液、进气管、空调蒸发器出口、车内外等温度检测。
PTC: 超过一定温度时,电阻明显增大, 主要用于过流保护、温度限制、加热等场景,如电机保护传感器。
面对高温场合,如发动机排气歧管、三元催化器温度高达 800℃以上, 传统的热敏电阻无法满足要求,通常采用铂电阻温度传感器进行测量。
本文参考来源:半导体行业观察
