研究人员开发灵活脚架 可提高机器人40%的行走速度
6月2日消息,据外媒报道,加利福尼亚大学圣地亚哥分校的机器人专家开发了灵活的脚架,可以帮助机器人在不平坦的地形(如鹅卵石和木屑)上以高达40%的速度行走。这项工作可用于搜索和救援任务以及太空探索。

由圣地亚哥大学圣地亚哥分校的工程师设计的配备脚架的现成的六足机器人,其行走速度比不配备脚架的机器人快40%。图片来源:加利福尼亚大学圣地亚哥分校
该论文第一作者、加州大学圣地亚哥分校雅各布斯工程学院博士生艾米莉·拉特罗普(Emily Lathrop)说:“机器人需要能够在自然、崎岖不平的地形上快速高效地行走,这样它们才能去人类能去的任何地方。”
研究人员将在2020年5月15日至7月15日举行的RoboSoft会议上介绍他们的发现。
加州大学圣地亚哥分校机械与航天工程系教授、论文资深作者迈克尔·T·托利说:“通常,机器人只能控制特定关节的运动,在这项工作中,我们展示了一种能够控制脚的刚度和形状的机器人,其性能优于传统设计,能够适应各种地形。”
脚架是由填充有咖啡渣的乳胶膜制成的柔性球体,咖啡渣中嵌入了受自然启发的结构(例如植物的根部)和人工解决方案(例如打入地下以稳定斜坡的桩)的结构。
脚架使机器人走得更快,抓地力更好,这是由于一种称为颗粒堵塞的机制,该机制可以使颗粒状介质(在这种情况下为咖啡渣)在呈固体状和呈液体状之间来回移动。当脚架碰到地面时,它们会站起来,紧贴地面,并提供坚实的立足点。然后在步骤之间转换时取消连接并松开,支撑结构可帮助柔性脚架在卡住时保持僵硬。
研究人员设计并建造了一个车载系统,该系统可以产生负压来控制脚架的卡塞,也可以产生正压来消除脚在每个步骤之间的卡阻。结果,可以用真空泵主动堵塞脚架,用真空泵从咖啡渣之间除去空气并使脚架变硬。但是,当机器人的重量将空气从内部的咖啡渣之间推出时,脚架也会被被动卡住,从而使它们变硬。
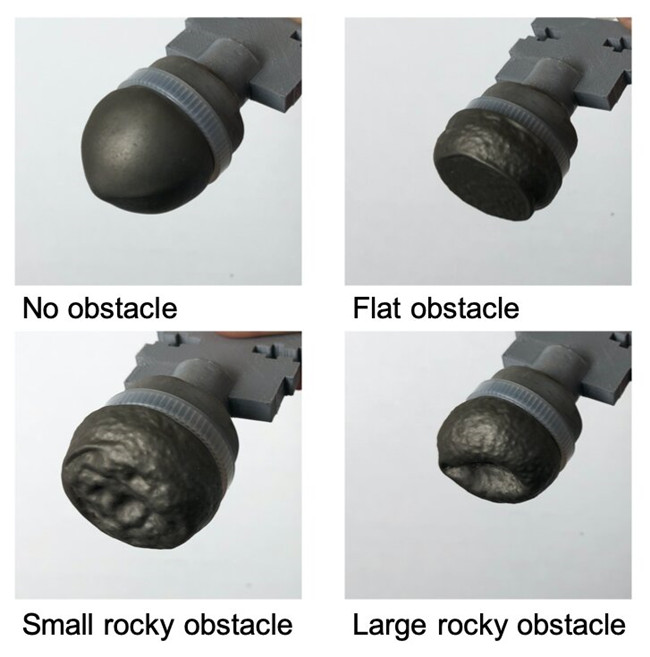
柔软的机器人脚与所踩踏的表面保持一致,从而使机器人可以更快地行走。图片来源:加利福尼亚大学圣地亚哥分校
研究人员测试了有脚架或没有脚架的机器人在平坦地面、木屑和鹅卵石上行走的情况。他们发现被动干扰脚架在平坦的地面上表现最好,而主动干扰脚架在松散的岩石上效果更好。脚架还帮助机器人的腿更好地抓地,从而提高了速度,当机器人在倾斜的不平坦地形上行走时,这些改进尤其显着。
加州大学圣地亚哥分校机械与航天工程系教授,研究合著者尼克·格拉维什(Nick Gravish)说:“自然世界充满了行走机器人的挑战性环境-光滑、岩石和泥泞的底物都会使行走变得复杂。可以适应这些不同类型地面的脚架可以帮助机器人提高移动性。”
在一篇由托利和格雷菲什共同撰写的论文中,研究人员以博士生希文·乔普拉(Shivan Chopra)为第一作者,精确地量化了每只脚架的进步程度。例如,与完全刚性的脚架相比,脚在冲击时在沙子中的穿透深度减少了62%,将脚架拉出所需的力减少了98%。
研究人员的下一计划包括在脚架的底部安装软传感器,以使电子控制板能够识别机器人将要踩到的地面以及是否需要主动或被动地卡住脚架,研究人员还将继续努力改进设计和控制算法,以使脚架更加高效。
自新型冠状病毒肺炎疫情爆发以来,传感器专家网一直密切关注疫情进展,根据国家及地方政府的最新调控与安排,为更好的服务相关企业,在疫情期间,传感器专家网免费发布企业相关文章,免费成为传感器专家网认证作者,请点击认证,大家同心协力,抗击疫情,为早日打赢这场防控攻坚战贡献自己的一份力量。
