工程师为柔性医疗机器人开发低成本、高精度的类似GPS系统
5月19日消息,加利福尼亚大学圣地亚哥分校的机器人专家开发了一种价格合理、易于使用的系统,可以跟踪柔性外科手术机器人在人体内部的位置。该系统的性能与当前技术水平相同,但价格便宜得多。当前的许多方法也需要暴露于辐射,而该系统则不需要。
该系统由加州大学圣地亚哥分校雅各布斯工程学院机械工程教授Tania Morimoto和机械工程博士生Connor Watson开发。他们的发现发表在2020年4月出版的IEEE机器人和自动化快报上。
Morimoto说:“连续体医疗机器人在体内高度受限的环境中工作得非常好,它们本质上比刚性工具更安全、更顺从。但是追踪它们在体内的位置和形状就变得困难多了,因此,如果我们能够更容易地追踪它们,这对患者和外科医生都将是一个巨大的好处。”
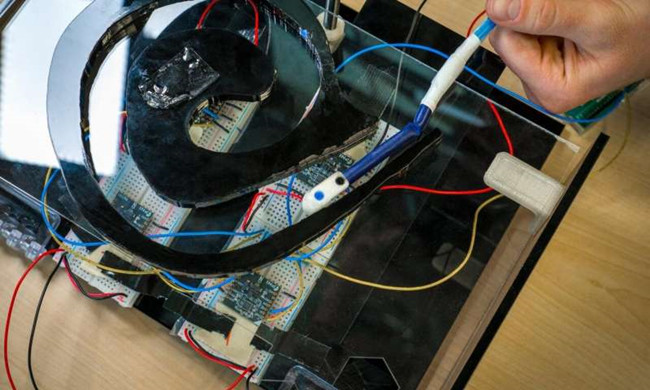
研究人员在一个灵活的机器人的尖端中嵌入了一块磁铁,该磁铁可用于人体内部的细微地方,例如大脑的动脉通道。Morimoto说:“我们使用了一个成长中的机器人,这是一个由非常薄的尼龙制成的机器人,我们像袜子一样将其翻转,然后用一种流体加压,使机器人得以成长。由于该机器人柔软且能够随着生长而运动,对周围环境的影响很小,因此非常适合在医疗环境中使用。”
然后,研究人员利用现有的磁铁定位方法(其工作原理非常类似于GPS),开发出一个预测机器人位置的计算机模型。GPS卫星对智能手机进行操作,并根据信号到达所需的时间,智能手机中的GPS接收器可以确定手机的位置。类似地,研究人员知道磁场应该在嵌入机器人的磁铁周围有多强,它们依靠四个传感器,这些传感器在机器人操作的区域周围小心间隔,以测量磁场强度,基于磁场的强弱,他们能够确定机器人的尖端在哪里。整个系统,包括机器人、磁铁和磁铁定位设置,成本约100美元。
研究人员随后还训练了一个神经网络来学习传感器所读取的数据和模型所说的传感器应该读取的数据之间的区别。结果,他们提高了定位精度来跟踪机器人的末端。
Morimoto说:“理想情况下,我们希望我们的定位工具能够帮助改进这类不断发展的机器人技术,我们希望推进这项研究,以便我们能够在临床环境中测试我们的系统,并最终将其转化为临床应用。”
自新型冠状病毒肺炎疫情爆发以来,传感器专家网一直密切关注疫情进展,根据国家及地方政府的最新调控与安排,为更好的服务相关企业,在疫情期间,传感器专家网免费发布企业相关文章,免费成为传感器专家网认证作者,请点击认证,大家同心协力,抗击疫情,为早日打赢这场防控攻坚战贡献自己的一份力量。
