MEMS传感器对无人机飞行性能的影响
伴随着人工智能、物联网等产业的不断发展,作为重要组成部分的传感器市场经历了飞速发展。截止到目前,我国传感器市场规模已超过1500亿元,品种分类已基本完善。根据2020年最新的发展趋势预测,业内人士普遍看好MEMS传感器和智能传感器的发展。
目前,基于MEMS的惯性和环境传感器已用于越来越多的设备中,包括智能手机,笔记本电脑,平板电脑,无线耳塞,电视和遥控器,AR和VR耳机,无人机,机器人以及许多其他消费类和工业设备。
得益于采用惯性MEMS传感器,无人机可确保其方向稳定,并可由用户精确控制,甚至可自主飞行。然而,一些挑战使无人机系统设计变得十分复杂,例如电机未完美校准,系统动态可能根据有效载荷而变化,操作条件可能出现突变,或传感器存在误差。这些挑战会造成定位处理偏差,并最终导致导航期间的位置偏差,甚至造成无人机失效。
要使无人机超越玩具的范畴,高品质MEMS传感器和先进软件至关重要。无人机的惯性测量单元(IMU)、气压传感器、地磁传感器、应用特定型传感器节点(ASSN)和传感器数据融合的精度对其飞行性能有着直接和实质的影响。

尺寸限制以及苛刻的环境和操作条件(如温度变化和振动)将对传感器的要求提升到新的水平。MEMS传感器必须尽可能避免这些影响,并提供精确、可靠的测量。
有多种方法可以实现出色的飞行性能:软件算法,如传感器校准和数据融合;机械系统设计,例如减少振动,以及根据无人机制造商自己的要求和需求选择MEMS传感器。下面就让我们仔细研究一下MEMS传感器并参考部分示例。
无人机的核心在于其姿态航向参照系统(AHRS),其中包括惯性传感器、磁力计和处理单元。AHRS估算设备定位,例如滚动、俯仰和偏航角。传感器误差(如偏移、灵敏度误差或热漂移)会导致定位错误。图1显示了加速度计偏移函数形式的定位误差(滚动、俯仰角),这通常是造成传感器连续误差的核心根源。例如,仅20 mg的加速度计偏移便会导致设备方向出现1度误差。

图:加速度计偏移引起的倾斜误差
惯性测量单元(IMU)
IMU包括加速度传感器和陀螺仪,以及相应的嵌入式处理程序。这使其能够在线性移动和旋转方面识别运动。
Bosch Sensortec的BMI088是一款六轴IMU,具有低噪声16位加速度计和低漂移16位陀螺仪。这种高精度设备的技术源自高端汽车传感器,因此可在长时间内提供出色的偏置和温度稳定性,并具有高振动稳定性,使其成为无人机应用的理想选择。
图显示了BMI088在不同温度下的典型偏移漂移。
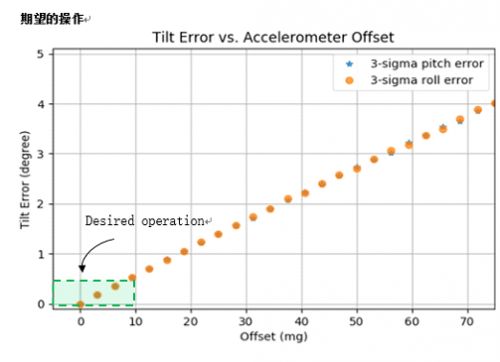
图:BMI088在不同温度下的典型零重力和零速率偏移漂移
所示的加速度计偏移漂移范围仅为10 mg,而陀螺仪传感器的偏移漂移则小于0.5 dps。此外,BMI088随温度变化呈现线性趋势,且滞后非常小。这使得BMI088十分适用于无人机和机器人应用。
气压传感器
无人机内置的高性能气压传感器可精确测量高度,并与IMU的高度控制读数结合使用。气压传感器必须尽可能避免外部影响和不准确性。
如今,结合诸如GPS和光流等附加传感器,距离传感器可用于提高系统的可靠性并减少位置误差。
对无人机中压力传感器的要求通常非常苛刻。由于受到不理想天气和温度条件的影响,高度精度必须保持在严格的公差范围内,而且传感器必须具有低延迟性,以及在长时间下的极低漂移。
除了TCO改进之外,还有多种因素有助于提高整体精度:相对准确度、噪声、稳定性和绝对精度。从笨拙的玩具到高精度飞机;只要工程师想得到,目前创新工业和商业无人机的应用潜力可以说无边无际。
磁力计
磁力计如同一部指南针,可以根据地球的磁场实现无人机的航向。IMU结合使用,可提供九自由度(DoF)解决方案,用于航向估算和导航。在宽泛温度范围内的稳定性能、高分辨率和抗强磁场的能力(无磁性可实现稳定的传感器偏移)使磁力计非常适合无人机应用,并最大限度地减少了传感器偏移校准所需的工作量。
应用特定型传感器节点
应用特定型传感器节点(ASSN)提供高度集成的智能传感器集线器,将多个传感器组合在一个封装中,并配有可编程微控制器。它为运动传感应用提供灵活的低功耗解决方案。
