高分辨率多向触觉传感器提高了机器人操纵和感知技能
近年来,世界范围内的研究人员一直在努力开发能够在机器人中复制人类触觉并提高其操作技能的传感器,虽然其中一些传感器取得了显著的效果,但现有的解决方案大多具有较小的敏感场或只能采集低分辨率的图像。加州大学伯克利分校(UC Berkeley)的一个研究小组最近开发了一种新型的多向触觉传感器omnitac,它克服了先前开发的传感器的一些局限性,该研究小组发表的一篇论文中表明,它将充当一个人工指尖,允许机器人感知它所持有或操纵的物体的特性。
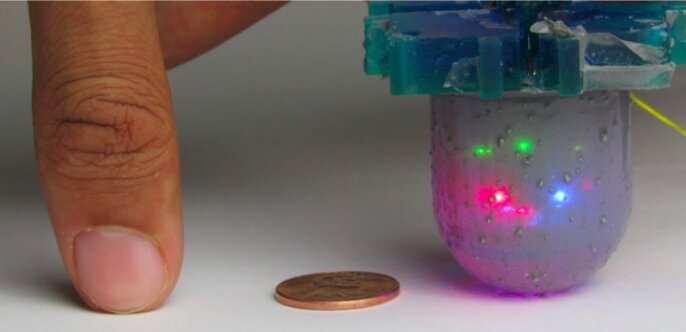
OmniTact旁边的人拇指和美分:显示传感器的尺寸
进行这项研究的研究人员之一弗雷德里克·埃伯特(Frederik Ebert)表明:“我们的实验室认识到需要一种传感器来完成一般的机器人操作任务,这种传感器需要比现有的触觉传感器具有更大的能力,现有的触觉传感器要么是平面的,有小的敏感场,要么只提供低分辨率的信号。例如,GelSight传感器可提供高分辨率(即400x400像素)图像,但它又大又平,仅在一侧提供灵敏度,而光电传感器是弯曲的,但仅在单个点提供力读数。”
OmniTact是由埃伯特和他的同事开发的传感器,是由麻省理工学院和加州大学伯克利分校的研究人员开发的一种触觉传感器GelSight的改编,GelSight可以生成物体表面的详细三维地图,并检测其某些特征。
与GelSight相比,OmniTact是多向的,这意味着它的所有侧面都具有感知能力。此外,它可以提供高分辨率的读数,是高度紧凑和具有曲线形状。当集成到手爪或机械手中时,传感器就像一个灵敏的人工“手指”,允许机器人操纵和感知各种形状和大小不同的物体。

该图和图像说明了GelSight传感器和OmniTact之间的基本区别。
OmniTact是通过将多个微型相机嵌入硅胶制成的人造皮肤而制成的,摄像机检测凝胶皮肤的多向变形,产生丰富的信号,然后通过计算机视觉和图像处理技术进行分析,推断出机器人正在操作的物体的信息。
参与研究的另一位研究员Akhil Padmanabha说:“我们的团队使用基于学习的方法来利用高分辨率反馈,避免手动校准程序。OmniTact在传感器的所有侧面都提供触摸感应,从而允许机器人在与任何方向的物体接触时获得触觉反馈。”
埃伯特、帕德玛纳巴和他们的同事在一项相当具有挑战性的任务中评估了传感器的性能,在这个任务中,机器人必须将电连接器插入插座,他们还测试了它在手指压在给定物体上时推断手指接触角的能力。在这些初始评估中,omnitac取得了显著的效果,在状态估计任务中,它的性能优于仅对一侧敏感的触觉传感器和另一个多向传感器。
参与研究的另一位研究员Stephen Tian说:“通过我们对OmniTact的实验,我们发现,多向、高分辨率的触觉感知能够实现某些精细的操作任务,比如我们提出的连接器插入任务。我们怀疑,在未来,除了在外科手术以及海洋和太空任务中的机器人远程操作等应用之外,多向触觉传感可能是通用机器人操作的一个基本要素。”
研究人员使用通常用于内窥镜的微型摄像机构建传感器,将硅胶直接浇铸到摄像机上。因此,OmniTact比以前开发的GelSight传感器要紧凑得多,因此可能有更广泛的应用范围,在未来,它可能为创造具有更复杂传感能力的新型机器人铺平道路。
帕德玛纳巴说:“我们计划让OmniTact更便宜、更紧凑,可以用于更广泛的任务。我们的团队还计划进行更多的机器人操作研究,为未来几代触觉传感器提供信息。”
