科技风暴下诞生的10款神奇机器人
随着科技的日益发展,机器人已经彻底改变了我们的生产线,未来还有望以多种方式改变我们生活的方方面面。
今天,我们一起来看看在科技风暴下诞生的10款机器人。
1、助力生物技术研究的微型磁化机器人
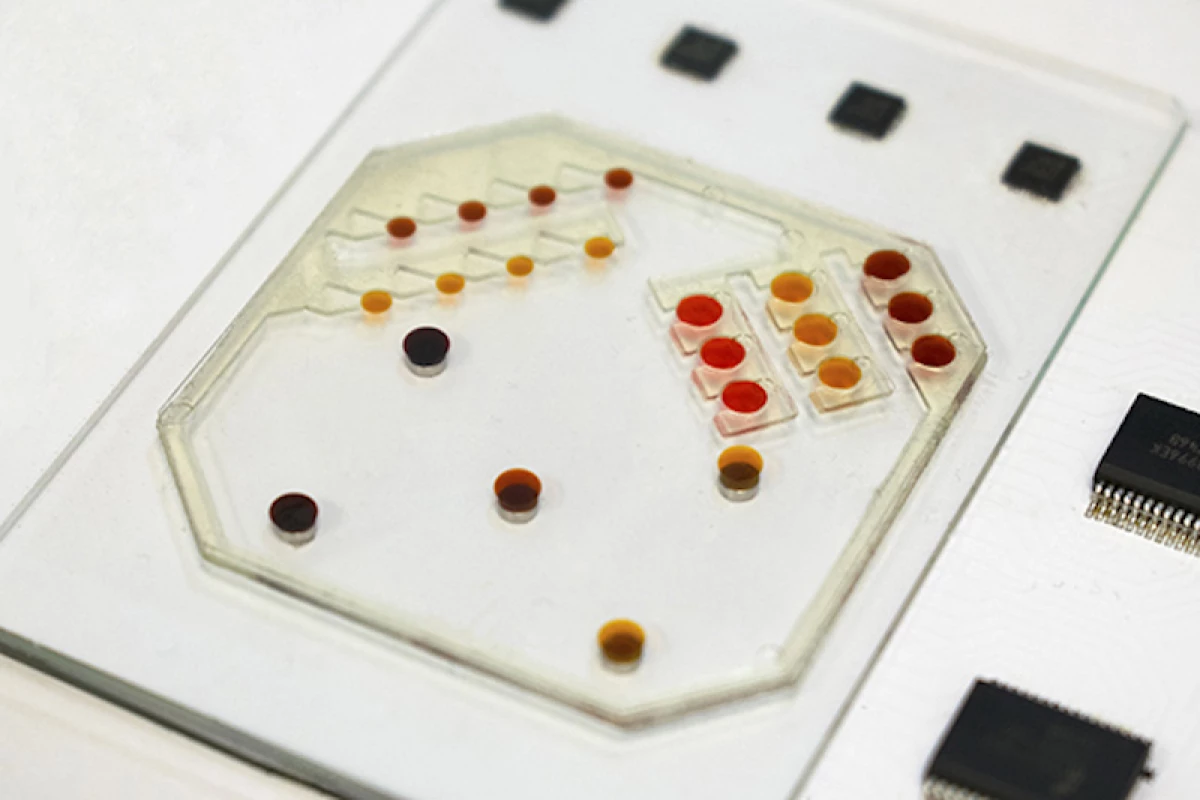
微型磁化机器人成为生物技术研究的“仓库”工人,可以非常精确地移动和沉积微小的液滴。
在生物技术研究中使用微流体的科学家通常依靠大型笨拙的机器来管理样品,但是这一修补工作有一天可以由微型机器人处理,从而使过程效率更高。加利福尼亚大学洛杉矶分校(UCLA)的工程师正在朝着这样的未来努力,他们已经开发了一组小型圆盘形机器,其功能类似于“仓库机器人”,可以非常精确地移动和沉积微小的液滴。
磁铁控制的微型机器人对生物技术研究意义重大
研究的资深作者萨姆·埃米纳尼亚德说:“我们受到网络移动机器人系统对制造业,存储业和分销业的变革影响的启发,例如那些用于在亚马逊仓库有效地分类和运输包裹的行业。” “因此,我们着手在微流体环境中实现相同水平的自动化和移动性。但是我们的“工厂地板”要小得多,大约只有您的手掌大小,而我们的货物(液滴)则只有十分之几毫米。”
该工厂车间的面积约为索引卡的大小,并配有内部结构和测试托盘,可容纳少量液体。这些机器人的直径约为2毫米(0.08英寸),并由集成在平台中的电磁砖操纵,这些电磁砖以预定的路径以每秒10厘米(4英寸)的速度拖拉它们。
该论文的共同主要作者余文卓说:“我们设定了打开和关闭瓷砖的时间和位置,以引导铁机器人通过它们的指定路线。” “这使我们可以让多个机器人在同一空间中以相对较快的速度工作,以高效地完成任务。”
以此方式,磁性机器人能够一起工作以执行某些工作。在一项实验中,三个机器人合作移动和操纵了人类血浆样本,作为癌症生物标志物测试的一部分。他们还具有将一个较大的液滴切割成较小的,相等的液滴以进行一致测试的能力,将液滴沉积到测试托盘中,以及将不同的流体合并为单个样品。
研究称:“就像移动和跨协作的亚马逊机器人改变了物流业一样,我们的技术可以改变与生物技术相关的各种产业,包括医学诊断,药物开发,基因组学以及化学和材料合成。”共同通讯和资深作家迪诺·迪卡洛(Dino Di Carlo)。这些领域传统上使用的是冰箱大小的“液体处理”机器人。使用更小的铁机器人,我们有潜力在相同的原材料和相同的时间内进行更多的实验,并产生更多的数据。”
2、日本建筑机器人HRP-5P
日本国家先进工业科学技术研究院(AIST)研发了一个原型机器人HRP-5P,该机器人旨在在人手短缺的情况下在建筑工地上工作。

HRP-5P机器人旨在帮助应对该国出生率下降和未来潜在的劳动力短缺问题
毫无疑问,HRP-5P机器人速度缓慢,但精度却惊人,它可以捡起一块石膏板并将其拧入墙壁,可用于在复杂的建筑环境中复制人类的动作,这预示着仿人机器人可以取代更多人类工作的未来。
3、像植物一样生长的MIT机器人
麻省理工学院的机器人专家开发了一种新的机器人,该机器人的肢体有些像植物,其部位可以在举起重物之前穿过狭窄的空间。
该机器人的自行车链状臂显然具有足够的柔韧性,可以在或多或少的任何空间中找到自己的方式,但也足够坚硬,可以提起负载或施加扭矩。链条通过沿着互锁的3D打印块拉动而自身延伸,当固定在一起时,它们会延伸臂。
绞车用于转动链条,通过一组电机将其输送,这些电机可以进行编程以将块锁定为不同的配置。通过将一些块锁定在一起,而将另一些块解锁,可以使臂以不同的形状和方向生长。一旦完成任务,机器人就可以缩回手臂,并以不同的配置重新伸出以适应新任务。

机器人旨在解决“最后一只脚的问题”,本质上是机器人到达目的地后如何处理任务的问题。以前尝试过使用柔软的材料来解决最后一只脚的问题,例如膨胀气球状的材料,但这些材料往往无法支持有用的工具,例如抓手,照相机和其他传感器。因此这项新技术尽管灵活,但不足够坚固,其可以支撑的重量不超过1磅(0.5千克)。
4、微型无人机Fly Cro Tug
斯坦福大学研发的微型无人机Fly Cro Tug可以抓取和搬运重物,打开车门。
2018年早些时候,波士顿动力公司透露,其Spot Mini机器人现在能够使用机械手打开门。但是,尽管它叫Mini,但它的四足机器人可能还不够小,无法进入狭窄的空间或穿越地震造成的废墟。微型无人机可能更适合这种情况。如果它也可以做一些繁重的工作,那就更好了。斯坦福大学的研究人员已经修改了微型飞行机器人,以便它们可以蹲下并移动其重量40倍的物体。
斯坦福大学的研究人员将他们的作品命名为Fly Cro Tug,名字充分描述了其功能——飞行、蹲伏和拖拽。Fly Cro Tug的体积小,意味着它可以在狭小的空间中飞行并与人保持非常近的距离,这将在搜索和救援情况中派上用场。
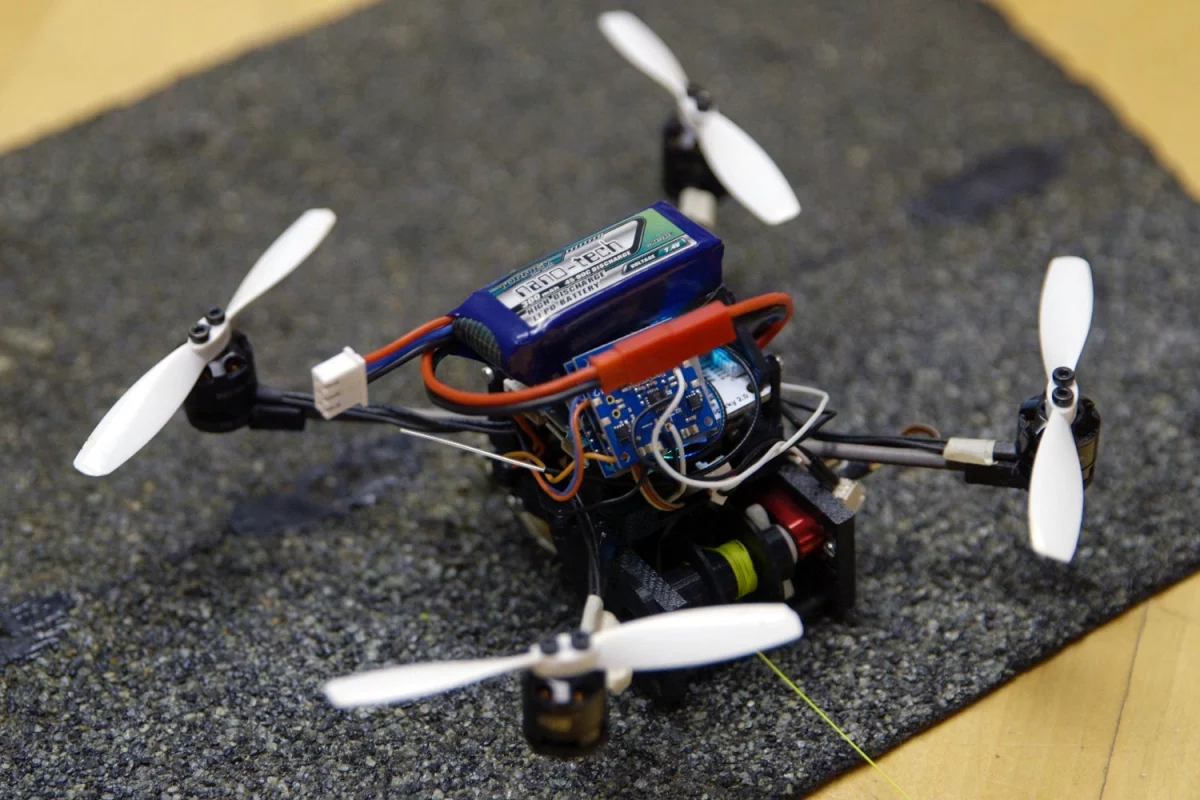
小型无人机可以飞到灾难现场,降落并暂时将自己固定在各种地面上。这要归功于壁虎启发的用于光滑表面的粘合剂或32种钩状的微脊柱,它们受到昆虫的刺激而形成了粗糙的表面,这两种材料都是先前在仿生和灵巧操作实验室开发的。
实验室的马克·库特科斯基说:“黄蜂可以迅速飞到一块食物上,然后,如果东西太重而无法起飞,它们就会沿着地面拖动。” “因此,这是我们采取的方法的开始灵感。”
每个FlyCroTug都装有一个小型绞车,以便在降落时,山雀可以将其重量拉至其重量的40倍,放下摄像机,放下摄像头,以使救援人员可以观察该区域甚至打开门。
在关闭的门作为障碍的情况下,单个FlyCroTug可能会发现按住把手并拉动门会产生一点点负担,因此研究人员让其中两个一起工作。
人们倾向于将无人机视为飞行和观察世界的机器,但是飞行昆虫会做很多其他事情,例如行走,攀爬,抓握,搭建,社交昆虫甚至可以合作来增添力量。通过FlyCroTug,证明了能够固定在环境中并与其他无人机协作的小型无人机可以执行通常分配给类人机器人或更大机器的任务。
5、泡沫送货机器人
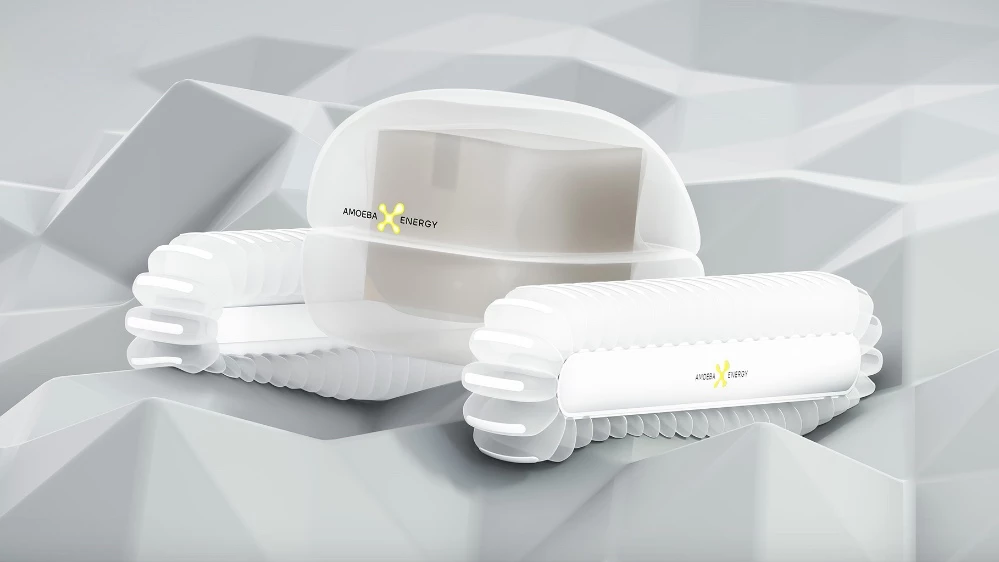
尽管我们已经看到了很多旨在将包裹运送到人们家中的机器人,但其中大多数机器人都受到房屋前路的阻碍。东京的Amoeba Energy(变形虫)开发了一种解决方案,采用履带式机器人的形式,该机器人使用软泡沫轻松爬上楼梯并越过其他障碍物。

变形虫的泡沫机器人,其特征是采用海绵状但耐用的EPDM(乙烯丙烯二烯单体)材料制成的类似卡特彼勒的履带。
“轨道本身是由柔软的材料制成的,因此它可以根据任何楼梯的形状自行变形,”总工程师久井喜成(Yesei Kujirai)告诉我们。“这有助于最大化接触表面,使其非常稳定。”
到目前为止,EPDM经受了五个月的测试和演示,几乎没有磨损。尽管机器人的马达,电池组和其他电子设备都很坚硬,但其主体也被柔软的泡沫覆盖。包括此功能是为了保护可能会靠近机器人的人,以防它摔倒。
Kujirai说:“亚马逊正在尝试创建一个最后一英里的送货机器人,但它不能真正地上下楼梯,因此仍然需要一个人从他们家门口捡起东西。” “我们相信,可以爬楼梯的柔软,人性化的机器人将是完成交付自动化的最后一部分。”
变形虫现在正在研究一种自动商用的机器人,称为AE-01,该机器人将能够承载高达6千克(13磅)的有效载荷。
6、自动块机器人M-Blocks
麻省理工学院的计算机科学和人工智能实验室(CSAIL)开发了一款自动块机器人M-Blocks。这是一组可以滚动,跳跃,旋转和排列成不同形状的机器人立方体,它们可以互相认出,并堆成所需的形状。
Blocks内部装有飞轮,飞轮以20,000 rpm的转速旋转。当这些刹车突然制动时,角动量会沿该方向推动滑块,让它们旋转和翻转。
一个孤独的块机器人没有多大用处,但是他们的想法是他们可以聚在一起完成更有趣的任务。为此,它们在每个边缘和面都嵌入了磁铁,以使其卡在一起,并且在每个面上具有独特的图案,以使它们彼此识别。麻省理工学院称它们为“ M块”。
“ M代表运动,磁力和魔力,” CSAIL主管Daniela Rus说。“'运动',因为立方体可以通过跳跃来移动。“磁铁”,因为这些立方体可以使用磁体连接到其他立方体,并且一旦连接,它们就可以一起移动并连接到组装结构。“魔术”,因为我们看不到任何活动部件,并且立方体似乎是由魔术驱动的。”

研究人员证明,拥有16个M块的自主团队可以完成团队合作,例如将自己排成一条线,跟随其他块上标记的箭头或移向光源。当它们足够靠近在一起时,它们会磁性地卡在一起。从那个位置,他们甚至可以通过“向上”扔自己而彼此爬上。一旦位于其他块的顶部,它们就可以向下滚动,一次只换一个面。
M区块在实现其目标方面相当有效,成功率约为90%。例如,在在线实验中,对这些块进行编程以查看它们的邻居并弄清楚它们是否连接到正确的位置。如果不是这样,它们将朝一个方向滚动直到到达行尾。
尽管这些测试仅涉及16个模块,但该团队表示该技术具有可扩展性,未来的应用群可能达到数百,数千甚至更高。
该研究的主要作者约翰·罗曼尼辛说:“关于我们的方法的独特之处在于,它价格便宜,功能强大,并且可能易于扩展到一百万个模块。” “ M块可以以一般方式移动。其他机器人系统具有复杂得多的运动机制,需要很多步骤,但是我们的系统具有更高的可扩展性。”
这些拥挤的机器人块不仅可以做些绝招,还可以做更多的事情。该小组表示,最终他们可以投入工作来建造临时结构,例如楼梯,以帮助人们进行检查或应对灾难。他们还可能最终用于制造业,医疗保健或游戏应用。
7、HyQReal四足机器人可拖曳三吨重的客机
新一代HyQReal四足机器人如今已经可以拖曳三吨重的客机!对于这个不比机器狗大很多的液压驱动机器人,这是令人印象深刻的力量展示。
HyQReal的长度为133厘米,高为90厘米(4.3 x 3英寸),而总重量为130千克(287磅)。在引擎室中是一个48 V电池,该电池为四个电动机提供动力,这些电动机最多可连接四个液压泵以使机器人运动。同时,一台计算机可以帮助HyQReal导航周围的环境。所有这些都包裹在铝制防滚架中,并由凯夫拉尔纤维,玻璃和塑料制成的蒙皮。
该机器人是由IIT-Istituto Italiano di Tecnologia的科学家开发的,该科学家最近将其能力推到了意大利热那亚机场的极限。该团队将HyQReal连接到Piaggio P180 Avanti,一架长度为14.4 m,翼展为14 m(47和45 ft),重达3,300千克(7,275磅)的小型客机上。
拖曳的最初,机器人用橡胶脚看上去确实很挣扎,但是却可以一只脚紧接着另一只脚,在相对较短的距离内将飞机缓慢拖入高速公路。尽管这是一个令人印象深刻的奇观,但该研究项目的总体目标是开发可以在灾难情况下帮助人类的机器人。您可以想象HyQReal利用这种牵引能力从倒塌的建筑物中拉出巨大的瓦砾。
IIT的Dynamic Legged Systems实验室项目负责人Claudio Semini说:“拉飞机使我们能够展示机器人的力量,动力自主性和优化的设计。”

8、蜂鸟机器人可以悬停,搜索和救援
普渡大学的研究人员建造了一只受蜂鸟启发的无人机,并使用根据鸟类自然飞行模式训练的算法教其飞行。
普渡大学的蜂鸟机器人几乎与峰鸟一样大,它的翼展为17厘米(6.7英寸),重量相当于普通成年蜂鸟的重量-纤细的12克(0.4盎司)。另外,它可以举起两倍于自身重量的重量,最大可达27克(0.95盎司)。它全部包裹在3D打印的机身中,该机身带有由碳纤维和薄膜制成的机翼,机翼可以以高达40 Hz的频率拍动。
最重要的是,它可以像蜂鸟一样飞翔。这比机器人听起来要令人印象深刻–这些毫不张扬的小鸟可以起飞一些鸟类所知的最疯狂的空中特技,包括在0.2秒的时间内将鼠标悬停并旋转180度。

研究人员观察了活蜂鸟中的这类动作,并从中构建了算法,然后将其编入现实的蜂鸟行为计算机模拟中。然后将其用于教导机器人飞行。
管蜂鸟启发的无人机不一定是最快或最远的飞行器,但它们改进的机动性和相对较小的尺寸意味着它们可以穿越其他机器人无法容纳的空间。研究人员以在灾难发生后将无人机送入倒塌的建筑物为例,以帮助寻找幸存者或评估损失。
有趣的是,该机器人没有摄像头,因此尚无法看到,但是通过电子触摸感和可以分析这些触摸的AI算法,它可以在黑暗中正常导航。
9、漫游机器人AntBot,无需使用GPS即可独立导航
通常,当我们听说能够在户外独立导航的机器人或其他设备时,就可以知道它们使用GPS。但是,法国科学家已经开发出了另一种选择,例如六足形机器人可以像蚂蚁一样导航。
该机器是由CNRS研究所和艾克斯·马赛大学的研究人员开发的,被称为AntBot。它的导航系统基于Cataglyphis沙漠蚂蚁的导航系统,它可以从其殖民地行进数百米而不会丢失。

大多数觅食蚂蚁都可以通过沿着信息素的踪迹找到返回自己的殖民地的途径,它们在寻找食物时会沉积在地面上。但是,在Cataglyphis的沙漠栖息地,炎热的阳光会迅速烧掉这些信息素。相反,蚂蚁以两种方式定向自身。
首先,它通过注意其相对于天空中偏振光模式的位置来确定其前进方向-不管是晴天还是阴天,蚂蚁的眼睛都可以看到这些偏振光。其次,它确定它多远通过计数其步骤行进,并通过光流 -后者仅仅指的是一个过程,其中观察者视觉笔记它们通过在它们的环境表面和物体如何迅速通过。
AntBot结合了自己的这种两管齐下的方法。
它配备了一个光学罗盘,可用于根据天空中的偏振光检查其航向,以及一个光学运动传感器,可用于从视觉上确定其从起点走了多远。该设置使机器人可以探索其周围长达14米(46英尺)的距离,并以高达1厘米(0.4英寸)的精度回到其基座。
现在希望在GPS不可用或不切实际的情况下,有朝一日可以使用2.3千克(5磅)的AntBot的后代来自动穿越崎disaster的地形,例如灾难现场。
10、医用微型机器人会自动改变形状以在体内游动
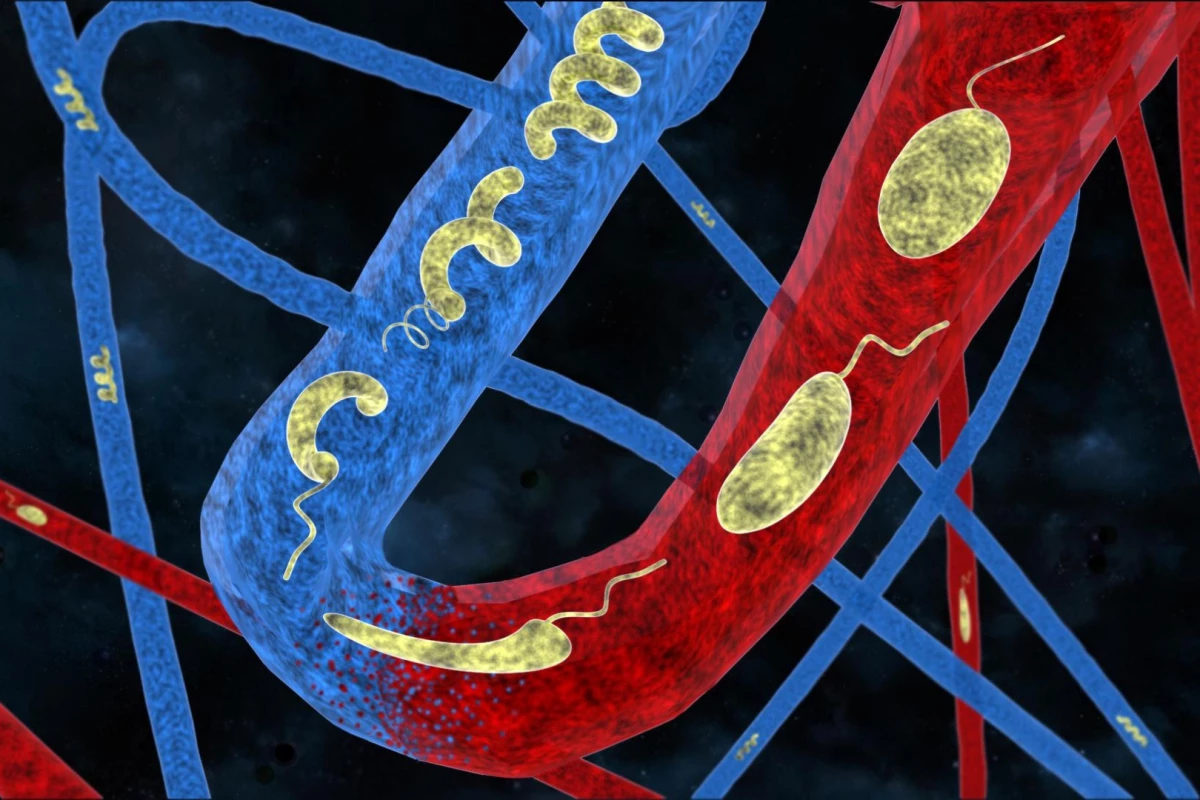
EPFL和苏黎世联邦理工学院的研究人员开发出了医用微型机器人,可以根据周围环境自动变形。这意味着,它可以在您的身体中游动、爬行,输送药物或擦洗您的动脉等。
该微型机器人由像折叠纸一样折叠的生物相容性水凝胶层组成,这种方案在其他许多设计用于人体的微型机器人中也可以看到。微小的磁性粒子被嵌入到材料中,因此可以使用变化的电磁场从体外驱动它。
但是,这些新机器人在设计时也具有一定的自主权-它们会根据周围的环境改变形状,将自己折叠并展开为最有效的形状。例如,研究小组发现,管状主体和平坦的船尾尾桨是在低粘度液体中游泳的最佳设计,而螺旋形状则可以更好地通过粘性更大的液体。为了让机器人自己在两种形状之间进行转换,研究小组对其进行了设计,使其由较高的蔗糖浓度触发。
这项研究的首席研究员Selman Sakar解释说:“我们的机器人具有特殊的成分和结构,可以适应正在流动的流体的特性。例如,如果它们遇到粘度或渗透浓度的变化, ,他们修改形状以保持速度和可操纵性,而不会失去对运动方向的控制。”
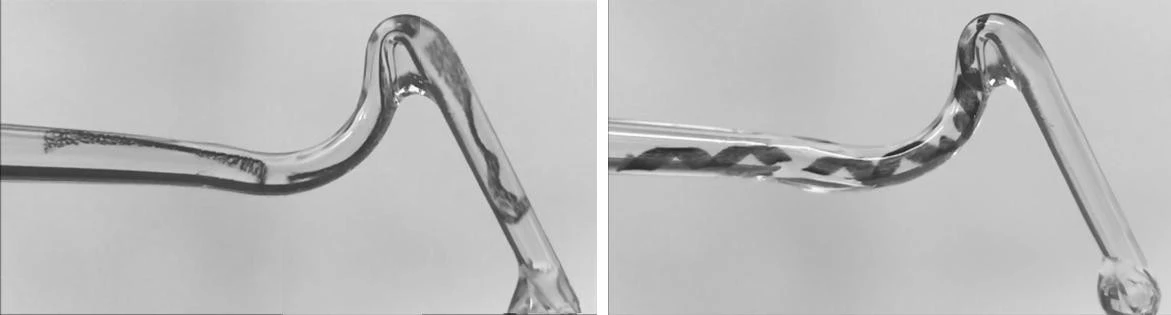
研究人员通过将机器人穿过设计成模仿血管的狭窄玻璃管中来测试机器人,它们在其中以不同速率流动的不同粘度的流体中游动。这有助于团队确定在哪些环境中哪种形状更好。
该团队多年来一直在开发微型机器人,但这些机器人似乎是迄今为止最先进的。将来,这项工作可能会导致机器人将药物直接递送到需要药物的身体部位,甚至尽可能无创地进行手术。
