激光雷达系统的七大组成部分
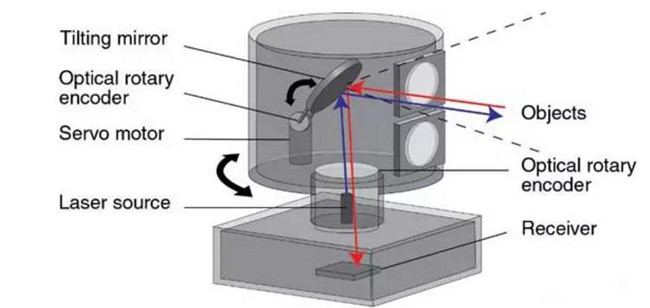
一个基本的激光雷达系统包括一个由旋转镜反射的激光测距仪(顶部),激光在被数字化的一维或二维场景周围被扫描(中间),以指定的角度间隔收集距离测量值(底部)。
激光雷达系统由以下几个主要组件组成。
一 激光
600-1000nm激光最常见于非科学应用。激光的最大功率是有限的,或者使用自动关闭系统在特定的高度关闭激光,以确保工作人员的安全。
1550 nm激光是一种常见的替代方法,在相对较高的功率水平下对人眼安全,因为该波长不会被眼睛强烈吸收,但是检测器技术的发展不太先进,因此这些波长通常以较低的精度在较长的范围内使用。它们也用于军事应用,因为在夜视镜中看不到1550 nm ,这与较短的1000 nm红外激光不同。
机载地形测绘激光雷达通常使用1064nm二极管泵浦的YAG激光器,而测深(水下深度研究)系统通常使用532 nm倍频二极管泵浦的YAG激光器,因为532 nm穿透水的衰减比1064 nm 小得多。激光设置包括激光重复频率(控制数据收集速度)。脉冲长度通常是激光腔长度、通过增益材料(YAG、YLF等)所需的通过次数以及Q开关(脉冲)速度的一个属性。如果激光雷达接收器检测器和电子设备具有足够的带宽,则可以使用较短的脉冲获得更好的目标分辨率。
二 Flash激光雷达
Flash(闪光)激光雷达相机的焦平面具有像素行和列,这些像素具有足够的“深度”和“强度”以创建3D景观模型。每个像素记录每个激光脉冲击中目标并返回到传感器所需的时间,以及被激光脉冲接触的物体的深度、位置和反射强度。闪光灯使用单一光源,该单一光源以单一脉冲照明视场,就像照相机拍的是距离,而不是颜色。
机载光源使Flash激光雷达成为一个主动传感器。通过嵌入式算法处理返回的信号,以生成传感器视场内物体和地形特征的近乎即时的3D渲染。激光脉冲重复频率足以生成具有高分辨率和准确性的3D视频。传感器的高帧速率使其成为各种应用程序的有用工具,这些应用程序受益于实时可视化,例如高精度的远程着陆操作。通过立即返回目标景观的3D高程网格,Flash传感器可用于识别自主航天器着陆场景中中的最佳着陆区域。
三 相控阵
相控阵可以通过使用单个天线的微观阵列照亮任何方向。通过控制每个天线的定时(相位),可以将一个内聚信号导向一个特定的方向。
自1950年代以来,相控阵已用于雷达,同样的技术也可以用于光。大约一百万个光学天线用于在特定方向上观察特定尺寸的辐射图,该系统由精确闪光定时控制,单个芯片(或几个)取代了价值75000美元的机电系统,从而大大降低了成本。
有几家公司正在开发商用固态激光雷达装置,其中包括正在设计905 nm固态器件的Quanergy公司,尽管它们似乎在开发中遇到一些问题。
控制系统可以改变镜头的形状以启用放大/缩小功能,特定的分区可以以亚秒间隔为目标。
机电激光雷达能持续1000至2000小时,相比之下,固态激光雷达可以运行100000小时。
四 微机电设备
微机电系统(MEMS)并非全固态。然而,它们微小的外形提供了许多相同的成本优势。单个激光被指向单个反射镜上,镜子快速旋转,该反射镜可以重新定向以查看目标场的任何部分。然而,MEMS系统通常在单个平面(从左到右)中工作。要添加第二个维度,通常需要上下移动第二个镜像或者,另一个激光可以从另一个角度击中同一反射镜。MEMS系统可能受到冲击/振动的干扰,可能需要重复校准。我们的目标是创造一个小型微芯片,以加强创新和进一步的技术进步。
五 扫描仪和光学元件
图像显影速度受其扫描速度的影响,扫描方位角和仰角的选项包括双振荡平面镜、多角镜和双轴扫描仪的组合。光学选择会影响角度分辨率和可以检测到的范围,可以选择使用孔镜或分束器来收集返回信号。
六 定位和导航系统
安装在飞机或卫星等移动平台上的激光雷达传感器需要仪器来确定传感器的绝对位置和方向,这样的设备通常包括全球定位系统接收器和惯性测量单元(IMU)。
七 传感器
激光雷达使用有源传感器提供自己的光源,能源撞击物体,反射的能量由传感器检测和测量。通过记录发射脉冲和反向散射脉冲之间的时间并使用光速计算行进距离,可以确定到物体的距离。因为相机能够发射更大的闪光灯并利用返回的能量来感测感兴趣区域的空间关系和尺寸,因此Flash激光雷达可以进行3D成像。由于不需要将捕获的帧缝合在一起,并且系统对平台运动不敏感,失真较小,因此可以实现更精确的成像。
使用扫描和非扫描系统均可实现3D成像。“ 3D门控观测激光雷达”是一种非扫描激光测距系统,可应用脉冲激光和快速门控摄像头。目前,使用数字光处理(DLP)技术进行虚拟光束转向的研究已经开始。
激光雷达成像也可以使用高速探测器阵列和调制敏感探测器阵列,通常使用互补金属氧化物半导体(CMOS)和混合CMOS /电荷耦合器件(CCD)制造技术在单芯片上构建。在这些设备中,每个像素执行某些本地处理,例如高速解调或门控,将信号向下转换为视频速率,以便阵列可以像照相机一样读取。使用这项技术,可以同时获得数千个像素/通道。高分辨率3-D激光雷达相机通过电子CCD或CMOS 快门使用零差检测。
相干成像激光雷达使用合成阵列外差检测来使凝视的单元素接收器像成像阵列一样工作。
2014年,林肯实验室宣布推出一款新的成像芯片,其像素超过16384像素,每一个像素都能成像一个光子,使它们能够在一幅图像中捕捉到广阔的区域。2010年1月海地地震后,美国军方就采用了像素技术数量的四分之一的较早技术,一架商务飞机在太子港上空3000米(10,000英尺)一次通行证就能够以30厘米(12英寸)的分辨率捕获城市600米平方的瞬时快照。林肯系统的速度要快10倍,该芯片使用铟镓砷化物(InGaAs),它在红外光谱中以相对较长的波长工作,允许更高的功率和更长的范围。在许多应用中,如自动驾驶汽车,新系统将降低成本,不需要机械部件来瞄准芯片。InGaAs使用的危险波长比在可见波长下工作的传统硅探测器要小。
