国内知名海洋传感器研发企业:我国水下机器人市场可达200多亿元
成立6年的青岛罗博飞海洋技术有限公司,是专门从事海洋观测装备及海洋传感器研发的高新技术企业。该公司的水下机器人产品,内置有深度传感器和电子罗盘等传感器定深、定向,目前被广泛用于大中型水产养殖企业、中广核系统、华能水电系统、国家海洋渔业局系统、国家深潜基地等单位,且多数都是以个性化定制姿态问世。
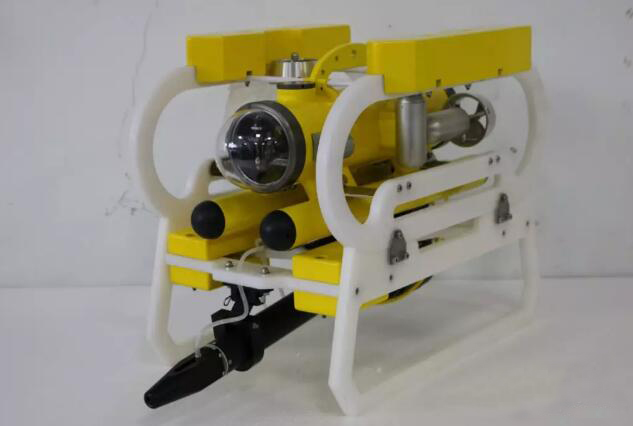
携带有注射器的罗博飞水下机器人,资料图
目前,针对中科院南海所对珊瑚礁生态圈监测的需求,该公司定制生产的海星打针机,是目前在这一应用领域国际上稳定性最好、精确度最高的微型水下机器人。曾有一段时间,在青岛南海海域,这些黄色的水下机器人,在海下自由穿梭,寻寻觅觅。一旦发现附近的珊瑚礁有海星前“来犯”,它就会快速击进,在精准度达1厘米的定位上抬起它的机械手,给海星注射一针“死亡药水”,来保护珊瑚。
另外,几年前,在湖南东江湖沉船事故的搜救工作中,该公司的水下机器人在水下100米上下,精准定位了3名失踪者遗体和船体残骸。据了解,前不久,该公司针对海洋牧场开发需求,研发出了最新的观测型水下机器人产品,重量轻、抗流能力强,潜器配备有深度传感器、湿度传感器、电子罗盘,具有定深、定向、上浮、下潜等功能。
水下机器人,资料图
日前,在受访时,该公司技术总监范平看来,今后除了特殊工程需求,水下机器人小型化是未来发展趋势,例如海洋监测,将会是一群小型机器人协同上阵。
针对国内水下机器人市场,科研草根出身的该公司创始人总经理马秀芬表示,中国的水下机器人的市场份额能达到200多亿元,这个蛋糕只靠罗博飞是吃不完的,只有形成一个完善的产业群,才能在这块领域站稳脚跟。
延伸阅读:美国大学研发仿生软体水下行走机器人 搭载有水流传感器
日前,美国加州理工大学研究者开发了一种新型仿生软体水下行走机器人。通过监测水流方向,该机器人可改变身体形状,并借助水流的流体特性,产生较大的拖拽力,极大提升其在水底行走的运动性能。
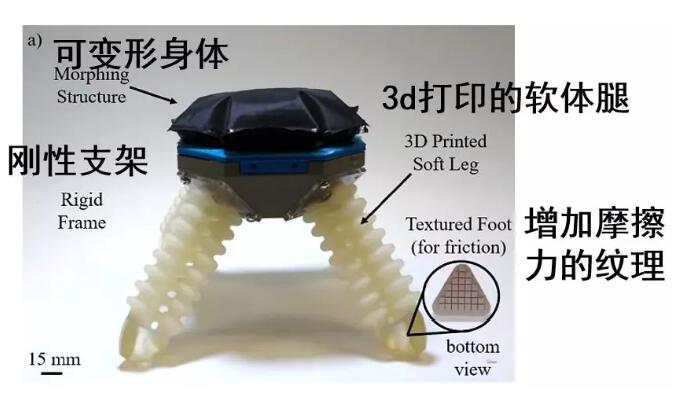
机器人的结构设计,资料图
传统水下机器人采用螺旋桨或喷射的驱动方式,在开放水域应用价值很高。但这些机器人体积大且伴有噪音,在小空间内较难前行。相较而言,利用仿生学设计的水下机器人,例如软体水下机器人,产生的噪音较小,还能适应不同的水下环境。
据了解,这种新型仿生软体水下行走机器人,基于气动/液压软体驱动器技术,可形变身体和4条腿安装于一个刚性的支架上。腿部由3d打印的弹性材料制成,每条腿有三个腔体,从而控制向不同的方向弯曲。机器人的身体变形部分,由两个充气小袋组成。腿部连接到传统气泵,由电磁阀控制,身体则连接到注射泵。
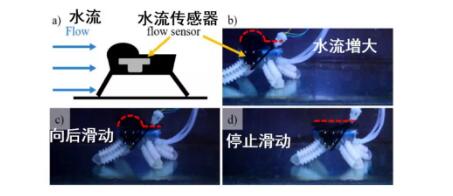
借助水流传感器,机器人可面对水流调整身体。资料图
机器人还搭载有一个水流传感器,可让其感知水流方向,从而改变身体形状来更好适应当前水流。如下图,机器人初始形状为沿着水流方向非对称膨胀,当机器人监测到水流速度超过某一个特定阈值后,便开始向后滑动。随后。机器人便调整身体为平整状态,从而减小了水流的作用并停止滑动。该实验证明机器人可有效通过调整身体,来适应不同的流速和流向的变化。
虽然该机器人仍处概念阶段,结构也简单,但经研究者初步验证,它有很高的潜在应用价值,包括帮助水下机器人在水流中保持稳定,或协助行走,这种概念也可以移驾到别的水下机器人系统上,通过软体驱动器来形成一些连续的曲面和水流发生交互。在未来的研究中,研究者计划更加准确地建模,并加入更多的反馈控制,来制造更可靠的水下机器人系统。
