光纤位移传感器的分类及其功能介绍
光纤位移传感器可分为元件型和天线型两种,前者用光纤作敏感元件,后者把光纤端面作为检测光的天线。
元件型光纤传感器是通过压力和应变等机械量使光纤特性发生变化来检测位移,其工作原理如下图所示。图(a)示出由于光纤长度和周径等变化,使光在光纤中传播的相位发生变化。该相位发生变化的光跟通过参考光纤的未发生相位变化的光发生干涉,根据干涉光强度的变化即可检测位移。图(b)是将位移转换成光纤弯曲应变的例子,弯曲使损耗增加,故输出光强度发生变化。图(c)示出了高灵敏度位移传感器的结构,用这种线状形光纤,很小的力就能产生较大的位移。元件型传感器可在恶劣环境中工作,这是天线型传感器难以媲美的。
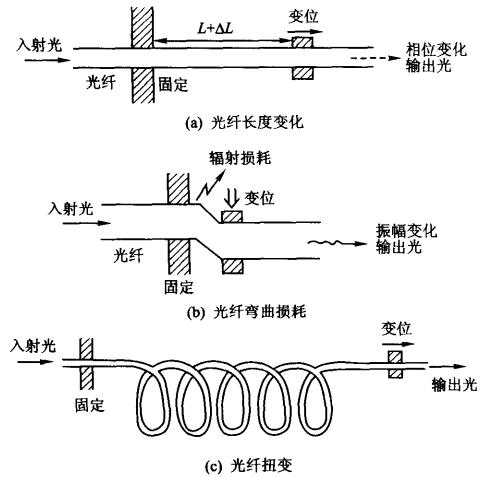
元件型光纤位移传感器的结构原理
天线型光纤位移传感器的工作原理如下图所示。
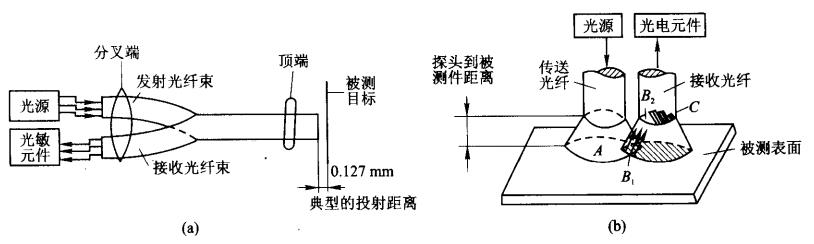
天线型光纤位移传感器的工作原理
当光纤探头端部紧贴被测物体时,发射光纤的光不反射到接收光纤中,没有光电流;当被测表面逐渐远离光纤探头时,发射光纤照亮被测表面的面积A越来越大,相应的发射光锥和接收光锥重合面积B1也越来越大,故接收光纤端面上被照亮的B2区也逐渐增大,有一个线性增加的输出信号。
当整个接收光纤端面上被全部照亮时,输出信号即达到下图所示位移-输出信号曲线上的“光峰点”,光峰点以前的曲线称前坡区。当被测表面继续远离时,被反射光照亮的B2面积大于C,即部分反射光没有反射进接收光纤,故光敏元件的输出信号逐渐减弱,位移-输出信号曲线进入后坡区。在后坡区,信号的减弱与探头和被测表面之间的距离平方成反比。在位移-输出曲线的前坡区中,输出信号的强度增加得非常快,所以这一区域可以用来进行μm级的位移测量。后坡区域可用于距离较远而灵敏度、线性度和精度要求不高的测量。而在所谓的光峰区域,输出信号对于光强度变化的灵敏度要比对于位移变化的灵敏度大得多,所以这个区域可用于对表面状态进行光学测量。
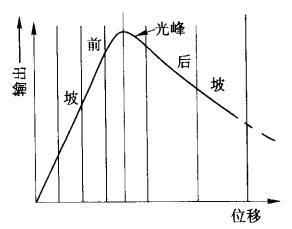
位移-输出特性
标准光纤位移传感器是由600根光纤Φ0.762 mm组成的光缆,纤芯是折射率为1.62的火石玻璃,包层是折射率为1.52的玻璃。光缆的后部分成发射光和接收光两支。光源是2.5 V的白炽灯泡。接收光信号的是光敏电池。光敏检测器的输出电信号与接收光的光强成正比。0.25μm的位移能产生1 V的输出电压,分辨率为0.025 μm。为使这种光纤传感器有较高的分辨率和灵敏度,必须把敏感探头置于离被测件0.127-2.54 mm的地方,这是一个很小的投射距离。为了扩大传感器的应用范围,可在光纤探头的前端加一专门的透镜系统,可使投影距离增加到12.7 mm或更大,而保持原有位移灵敏度。这种类型光纤传感器的灵敏度与所使用的光纤束特性有关。这些特性包括光导纤维的数量、光导纤维的尺寸和分布,以及每一根纤维的数值孔径,其中在光纤探头端部,发射光纤和接收光纤的分布状况是决定探头的测量范围和灵敏度的主要因素。例如,将接收光纤和发射光纤一个一个交错排列,可以获得最大位移灵敏度。但这样排列比较困难,花费也贵。若控制好光导纤维,随机排列也可近似地达到灵敏度的最佳值。
不同的光纤分布,以及改变光纤的一两个特性参数,也会影响到可测位移范围。例如,半球状分布的探头,测量范围比随机分布时要大。每根纤维的直径加粗,也有同样的效果。但是位移范围的加大,又伴随着灵敏度下降。
一般在光纤探头的端部,发射光纤与接收光纤有以下四种分布:随机分布(R)、半球形对开分布(H)、共轴内发射分布(CTI)、共轴外发射分布(CTO)。典型光纤传感器的光纤分布如下图所示。
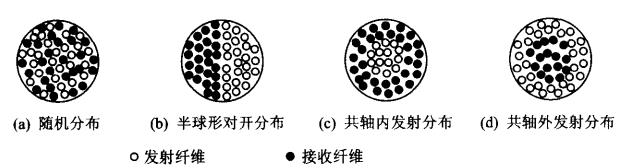
图 典型光纤传感器的光纤分布
值得一提的是,光纤传感器位移-输出曲线的形状取决于光纤探头的结构特性,但是输出信号的绝对值却是被测表面反射率的函数。为了使传感器的位移灵敏度与被测体表面反射率无关,可以采取“归一化”过程。首先将光纤探头调整到位移-输出曲线的光峰位置上,因为在这个位置上位移是独立于光强的,然后调整输入光,使输出信号达到满量程,这样就对被测表面的颜色、灰度进行了补偿。“归一化”后,就可将探头移到前坡区或后坡区进行位移测量了。这种归一化方法是入工的,实际上现在已经有专门的技术和线路用来对表面反射率进行自动补偿了。
光纤位移传感器可测量一切能最终转换为位移的物理量,例如物体受压力产生位移。下图所示的光纤压力(位移)传感器利用多模光纤受到与光纤轴垂直的力作用,而产生弯曲引起模式耦合,使得光在芯膜中再分配,从而把光从芯模耦合到包层模,引起包层模的光功率大大增加。通过检测裸光纤沿包层光功率输出的变化,可以测出位移和压力的变化。
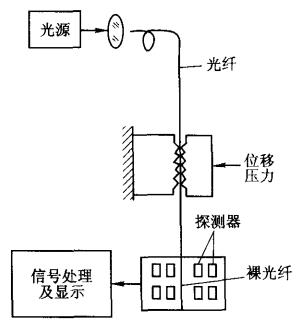
光纤压力(位移)传感器
