激光雷达市场在传感器融合背景下的主流技术路线
人类驾驶首先要用眼睛耳朵来感知周围的环境,汽车自动驾驶也是一样,它要用传感器来感知周围的环境。目前,随着智能驾驶产业的繁荣,激光雷达传感器市场已变得炙手可热,有关激光雷达话题的讨论也空前热烈。据调研机构Yole预测,全球激光雷达市场应用规模将在2023年达到63亿美元。

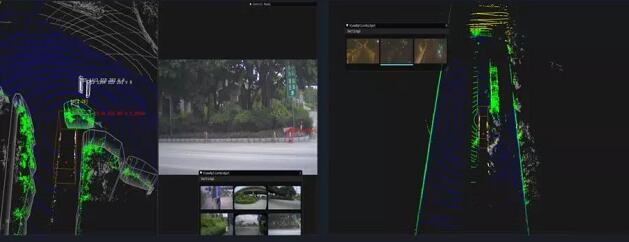
自动驾驶车辆激光雷达传感器,资料图
激光雷达与传感器融合
随着智能驾驶的不断推进,车载传感器数量正在快速增加。在未来自动驾驶感知领域,我们需要更安全、更可靠并且高性能的不同传感器的融合,才能对我们的环境建立比较好比较可靠的感知,这里面就包括摄像头、毫米波雷达以及激光雷达。
在这三种主要传感器中,毫米波雷达的重要性毋庸置疑,除了便宜外,它可穿透尘雾、雨雪、不受恶劣天气影响;摄像头也不可代替,但摄像头虽然有了形状,但它是二维的,识别精确度不够;激光雷达探测距离较远,且能准确获取物体的三维信息,辨识能力、测量能力较强,而毫米波雷达和单目摄像头这两个方面都有欠缺。不过,激光雷达也有其弱点所在,例如易受雨雪等极端天气影响,但整体来看,其市场潜力依然可观。
因此,从现实情况来看,不同传感器有不同的优缺点,目前,没有一种传感器可以适用于任何使用环境。
自动驾驶离不开传感器的融合,资料图
例如,就L2级别自动驾驶而言,交通拥堵辅助、集成式自适应巡航以及高速公路辅助等常见的系统一般需要6个传感器,典型的传感器配置是五个雷达和一个摄像头;升级到了L3、L4,例如HWP(高速公路自动驾驶)等方案,传感器数量会增加到15个或者以上;而当进一步扩展到城市里面去做自动驾驶,他们所需要的传感器数量会大于40个。目前,一些做城市自动驾驶出租车的公司,他们所用的传感器数量一般也都会超过40个。
有一种说法,激光雷达是实现 Level 3 和 Level 4 自动驾驶等级的必要条件。对此,目前,行业内大部分专家都认为,要达到L3或者L3以上的自动驾驶,必须使用激光雷达。
激光雷达三大主流技术路线
既然激光雷达前景可期,那么,眼下,激光雷达主流的技术路线有哪些?对此,业内人士指出,在技术路线上,新兴市场百家争鸣,同时,也在快速优胜劣汰、去伪存真。如今,已可以非常清晰的看到,这一市场有三大主流技术路线:
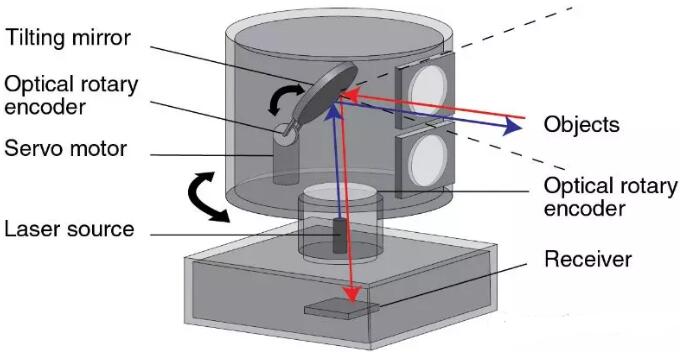
扫描式雷达
目前,扫描式雷达解决方案是目前被批量使用的主流方案,但主要是用在商业车队等场景中。究其原因,一是成本比较高很复杂,可靠性难以达到车规要求。二是不美观,私家车不容易接受。
MEMS激光雷达,资料图
MEMS激光雷达
作为机械旋转扫描式激光雷达的升级换代,MEMS激光雷达这一固态雷达,也被大量布局。业内人士认为,这一方案一定会走向量产,因为这是现在大多数厂家都会做的技术方案。并且,不同于扫描式雷达,MEMS固态激光雷达有可靠性和可制造性的优势,会在乘用车中被量产。业内预测2020年就会有带有这种雷达的乘用车宣布量产。
闪光式雷达(Flash Lidar)
这一类雷达现在的市面上并不太多,不是现在最主流的方案,但是做这个产品的公司都是大公司或创新性很强的公司,因为Flash Lidar对能量要求比较高,在技术上有很多的挑战,但有它天然的优势,即高分辨率和无时延。当然,Flash Lidar并不是要取代前两种方案,而是一种补充技术,是一个新的技术方向。
据了解,近两年,全球有超过8亿美元资金被投入到激光雷达公司。相信在未来,有了资本的加持,科技和创新的力量不断撬动原有的产业格局和产业形态,新兴领域将会诞生出更多的机会。
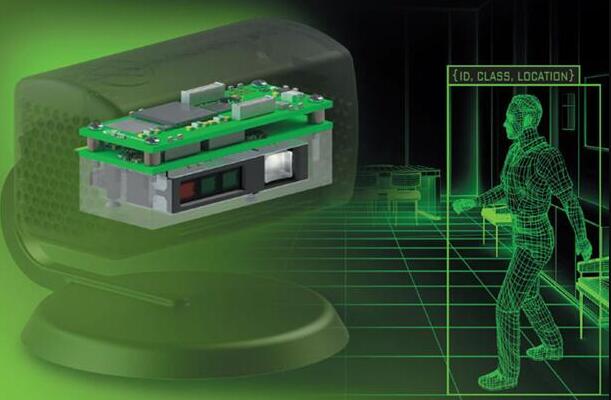
激光雷达光学扫描部件,资料图
关于激光雷达
LiDAR,是英文LIght Detection And Ranging的缩写,中文名称激光雷达。顾名思义,激光雷达是通过发射激光光束探测目标位置、速度等特征的雷达系统。激光雷达在短时间内向周围环境发射大量光子,通过测量反射回来光子的飞行时间(TOF, Time of Flight),计算与周围物体的距离。激光雷达可以在瞬间构建周围环境的3D地图,具有测量精度高、方向性好等优点。
