传感器让新型柔性减震机械手更安全
我们知道,机械手可通过感知器的内部传感器检测本身的状态,如速度、位置、加速度等,进而来实现本身与环境信息,如距离、温度和压力的相互作用,环境信息通过外部传感器进行检测。最近,美国纽约州立大学布法罗分校科学家开发了一款柔性减震机器人抓手,借助传感器对障碍物进行实时撞击检测,进而让抓手控制更为高效和安全。
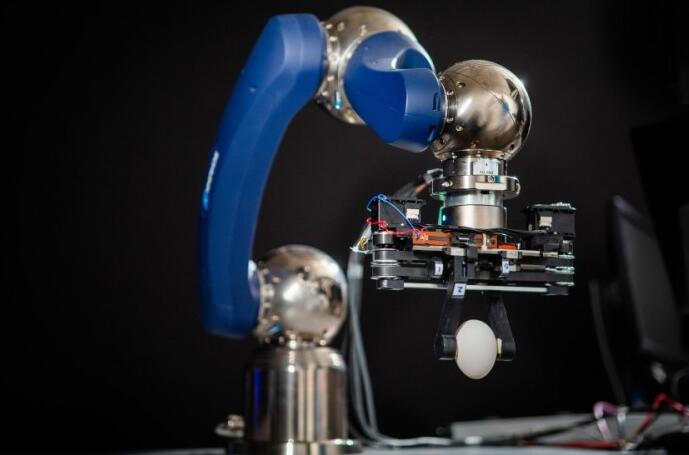
柔性减震机器人抓手,资料图
据悉,这种实验性夹手采用两个电动指状物,沿着轨道朝向或远离彼此滑动。每个指状物都安装在一个磁性底座上,磁性底座位于两个“排斥”的钕磁铁之间,用于推动它。两块磁铁实际上都不接触底座,所以底座的两侧和相应的磁铁之间都有一个间隙,这个间隙可以起到减震弹簧的作用。
当两个手指靠在一起以抓住它们之间的物体时,每个手指两侧的磁铁相对靠近其底座,通过推动手指保持牢固地固定就位。随着该物品随后被抓起和移动(通过附着抓手的机械臂),抓手总是可能意外地撞击障碍物。如果发生这种情况,集成传感器会检测到撞击,并通过将磁铁移动远离手指瞬间响应。这减小了排斥力,允许两个手指通过相对于夹持器的其余部分暂时滑动来吸收冲击。
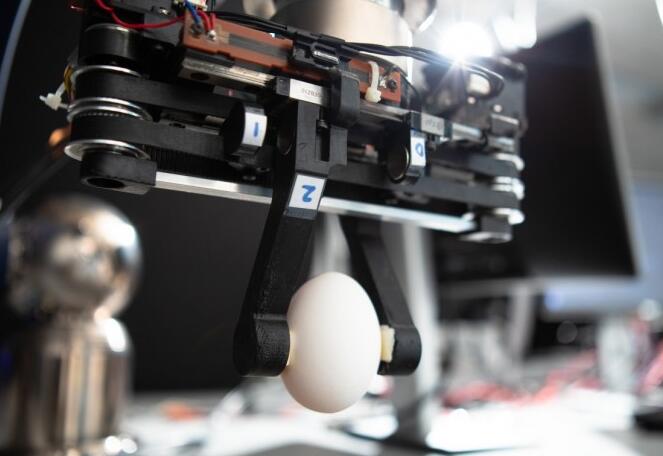
柔性减震机器人抓手,资料图
一旦障碍物被清除,磁铁就会重新移回,将手指推回到原来的位置。此外,该系统可用于与人合作的协作机器人,不仅可以保护正在运输的物品,还可以防止工厂工人受到工业机器人的伤害。
目前,该技术已通过衍生公司商业化,与第三方机械臂一起使用。相关研究成果在最近发表在《IEEE Transactions on Industrial Electronics》杂志上。
近期,瑞士联邦理工学院(EPFL)的科学家也结合神经工程和机器人技术,开发一种新型机械手。该机械手使用的其中一个概念从神经工程中获取,涉及确定截肢者残肢上的肌肉活动的运动,以用于假手的单独手指控制。该团队采用了一种新技术,允许机械手抓住物体并与他们保持联系以完成抓取物体的任务。

EPFL科学家开发的新型机械手,资料图
抓住物体的一个挑战是防止它们掉落。科学家们表示,当一个人拿着东西,当它开始滑动时,他们只有几毫秒的时间来作出反应。由于手指上的压力传感器,团队开发的机械手可在400毫秒内作出反应。
该团队还使用一种算法,该算法学习如何解码用户意图并将该意图转换为假手的手指移动。训练机械手需要被截肢者进行一系列手部动作。残肢上还安装有传感器,能够记录肌肉运动; 一旦理解了运动,该信息可用于控制机械手。
然后,团队设计算法以在用户尝试抓取对象时启动机器人自动化。一些用于自动抓取动作的技术来自之前关于机器人手臂的研究。不过,该团队表示,在将算法应用到商业机械手中之前,算法仍存在许多挑战。
