Waymo公布自动驾驶开放传感器数据集
据美国科技媒体VentureBeat报道,8月22日,谷歌兄弟公司Waymo发布了一部分用于培训汽车基础算法的数据:Waymo开放数据集(The Waymo Open Dataset)。Waymo首席科学家德拉戈米尔·安杰洛夫 (Dragomir Anguelov)称其为迄今为止发布的最大的自动驾驶多模式传感器样本集。

Waymo自动驾驶车辆,资料图
安格洛夫称,“借助首次亮相的Waymo开放数据集,我们邀请研究界加入其中,该数据集由Waymo自动驾驶车辆收集的高分辨率传感器数据组成。数据是机器学习的关键要素……而且,这些丰富多样的现实体验已帮助我们的工程师和研究人员开发出Waymo自动驾驶技术,以及创新的模型和算法。”
Waymo开放数据集包含了在菲尼克斯、柯克兰、芒廷维尤和旧金山等地,Waymo汽车在行驶数百万英里过程中所收集的数据,涵盖白天和夜晚、黎明和黄昏、阳光和雨水等各种城市和郊区环境。样本分为1000个行驶片段。
据了解,在每个行驶片段中,安装在每辆Waymo汽车上的传感器捕获20秒的连续行驶画面(以10赫兹的频率计算,相当于20万帧),Waymo汽车传感器包括5个定制设计的激光雷达(从物体上反射光线,绘制三维影像)和5个正、侧面摄像头。
另该数据库还包括贴有标签的激光雷达画面和车辆、行人、骑车人和标志图像,共捕获吧1200万个三维标签和120万个二维注释。Waymo说,相机和激光雷达的画面已通过其内部的3D感知模型进行了同步,这种模型融合了来自多个来源的数据,无需手动校准。
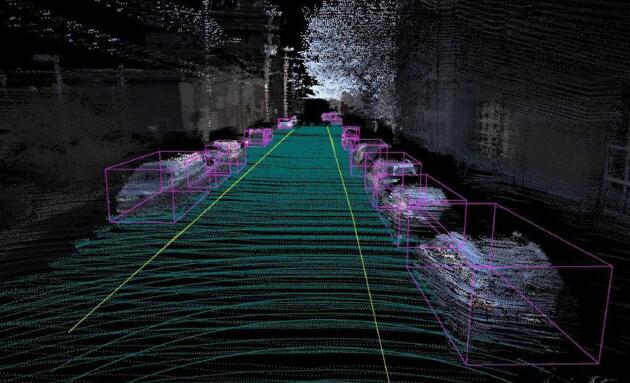
这些数据有望帮助研究人员在二维和三维感知方面取得进展,资料图
安杰洛夫称,“Waymo为我们设计了整个自动驾驶系统,包括硬件和软件,使其能够无缝协同工作,其中包括选择传感器位置和高质量的时间同步。这些数据有可能帮助研究人员在二维和三维感知方面取得进展,并在领域适应、场景理解和行为预测等领域有所进步。”
安杰洛夫希望研究界能够利用Waymo的数据,找到更令人兴奋的方向,这不仅有助于提高自动驾驶车辆的能力,而且还可能会影响到其他相关领域和应用,如计算机视觉和机器人技术。
Waymo大型数据集的发布之前,Lyft率先公开了自主开发的自动驾驶车辆数据库。除了55000多个人工标记的3D注释交通代理画面外,它还包含来自7个摄像头和最多3个激光雷达传感器的比特流,以及一个可驾驶的表面地图和一个底层的高清空间语义地图,其中包括4000多个车道段、197个人行横道、60个停车标志、54 停车区域、8个减速路障和11个减速带。
其它类似数据集包括来自数字独立测绘公司Mapillary的Mapillary Vistas街道级图像数据集、KITTI移动机器人和自动驾驶研究数据集,以及戴姆勒、马克斯普朗克信息学研究所和德国TU Darmstadt Visual Inference Group共同开发和维护的城市景观数据集。
根市场营销公司ABI的数据,到2025年,美国将有多达800万辆无人驾驶汽车投入使用,市场分析报告服务供应商研究和市场(Research and Markets)预计到2030年,美国将有大约2000万辆无人驾驶汽车行驶在路上。
