深度剖析自动驾驶“机器之眼”:360度无死角感知导航
“富豪们喜欢劳斯莱斯兰博基尼,金融男喜欢奔驰宝马,而技术宅程序员喜欢的是特斯拉。”
这是网友的一句玩笑话,但很真实。在崇尚技术的程序员眼中,特斯拉无疑是最具科技感的车,它的自动驾驶更是智慧与炫酷的象征,是前沿科技的代表。

那么炫酷的自动驾驶是怎么实现的呢?
自动驾驶实现的逻辑分三步,先是感知,通过传感器获取环境信息;再是决策,把获取的信息数据进行分析与处理后作出判断;最后是控制,基于所有系统分析数据控制汽车的加速器、转向等动力部件,进而实现自动驾驶。
整个逻辑看似很简单,但实现起来并不容易,尤其是第一步感知,因为环境是时刻变化的,不确定因素特别多,特别是恶劣环境会大大增加传感器获取环境信息的难度。不过,随着传感器技术的发展,如今自动驾驶的感知系统已越发完善,可360度无死角感知导航的“机器之眼”也成为了现实。
自动驾驶“机器之眼”:多传感器的融合
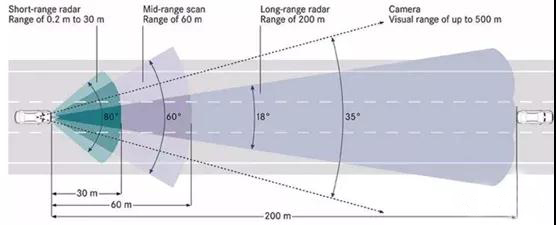
实现360度无死角感知导航的“机器之眼”并非是单个传感器的功劳,目前自动驾驶主流感知系统是多传感器的融合,包括激光雷达(LIDAR)、毫米波雷达和视觉传感器(车载摄像头)、三大核心部件,外加红外传感器、超声波传感器、惯性导航等辅助部件。
不同的传感器,特性不同,在自动驾驶感知系统里起的作用自然也不同。同时,因为每种传感器都有其局限性,所以需要与其他传感器配合使用,才能准确获取环境信息——看得远(探测距离远)、看得清(分辨率&物体识别)、足够稳定(全天候&受环境影响少)。

激光雷达是核心传感器中的核心,它能360度扫描周边环境并绘成相对精准的3D地图,获取到大部分的环境信息。但因为激光雷达受环境影响较大,不能全天候工作,所以需要加上可全天候工作的毫米波雷达和可在黑夜识别物体的红外传感器。
但无论是激光雷达,还是毫米波雷达,都属于光波探测,在精准识别物体属性方面是有局限性的,所以加入车载摄像头,可进行实物拍摄,采集到实物图像信息,识别具体物体属性,提高感知系统识别的精准度。
另外,车辆在行驶过程中,定位导航是非常重要的,所以也会加入惯性导航来协助定位。
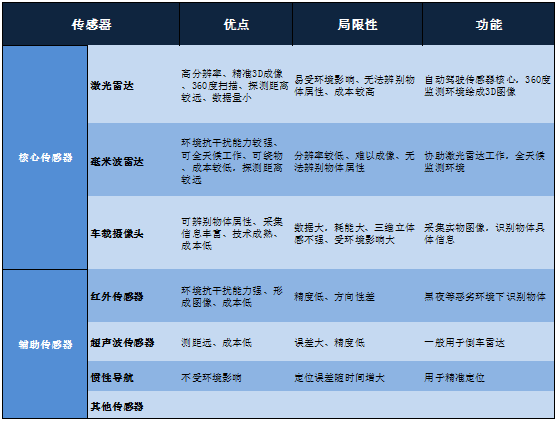
自动驾驶传感器一览,制图:沃感科技
激光雷达:360度扫描,绘制3D地图
自动驾驶能成为可能,最大功臣就是激光雷达。为什么激光雷达能使自动驾驶成为可能呢?简单来说是:绘制地图。
激光雷达是一种主动传感器,主动发射激光束,探测反射波,通过计算反射时间和反射波特征探测目标物体的距离与速度等信息。相比普通光,激光的单色性好,亮度高,方向性好,所以激光雷达在探测物体时,反应快、误差少、精度高。
但一条激光束如何实现360度探测呢?——增加激光束数量,然后转起来。
多条激光束可形成水平垂直面,再采用机械转动的方法,即能三维探测环境。每一条激光束探测到目标物的位置信息后,均反射回去进行信息聚合,再以点成线,以线成面形成目标物“点云”图像。
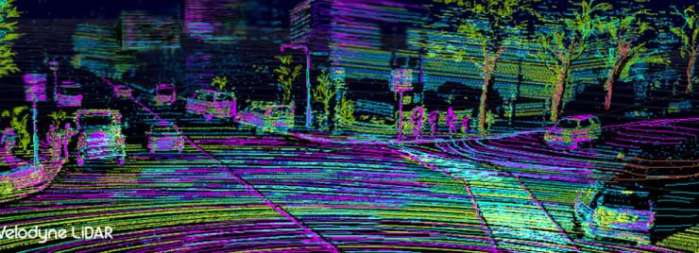
目前激光雷达传感器可每秒发送数百万激光束,精准探测周围的任何物体,并绘制成3D地图。你可以提前知道一条车道的轮廓、停止标志甚至是前面500米的红绿灯,还可以识别汽车、行人等障碍物以及他们的前进方向及速度。所以,激光雷达能实现自动驾驶汽车360°全方位无死角的可视能力以及极其准确的深度信息。在Uber和Baidu的自动驾驶汽车顶部,不断旋转的笨重盒子,就是激光雷达。

诚然激光雷达是个探测环境的好工具,但它也有弱点。比如在不良天气下,表现不佳,由于激光波长相对小,不能绕过空气中大分子障碍物,因而雨雪烟雾都会对激光造成阻挡,探测精度下降;还有激光雷达的成本实在太高了,Google测试无人车Waymo使用的3个64线激光雷达价格就高达22万美元,未来如果激光雷达的价格不降下去,那自动驾驶将因造价太高而难以大规模普及,所以对于传感器厂商来说,生产低成本的激光雷达是一个非常大的市场机会。
毫米波雷达:环境适应性强,可全天候导航
在自动驾驶里,毫米波雷达一般作为激光雷达重要的补充设备。
和激光雷达一样,毫米波雷达也是通过发射电磁波并通过检测回波来探测目标的有无、距离、速度和方位。但毫米波的频段比较特殊,高于无线电,低于可见光和红外线,频率范围在10GHz~200GHz之间,属于微波的范畴,波长在1mm~10mm之间,比激光雷达波长(近红外)长,所以具备了绕物能力,受天气和环境的影响小,能在云雨雾雪天气中使用(大雨除外),可全天候工作,这正好弥补了激光雷达受雨雪雾霾影响大的缺点。
在实际应用中,毫米波雷达发射出去的电磁波是一个锥状的波束,因为当目标物出现在大范围波束中时,是无法精确判断方位的,所以毫米波雷达使用大量阵列天线构成窄波束,进而有效提高方位精度。
但毫米波雷达波长较长,加上锥状波束的反射面大,以致其分辨率不高,不能清晰呈现目标物点云,较难成像,所以毫米波雷达只能作为激光雷达的补充,而不能替代激光雷达。
在自动驾驶系统里,毫米波雷达大致应用在前向雷达和后向雷达上。前向雷达应用包含自适应巡航ACC、自动紧急制动AEB、前方碰撞预警FCW、主动车道控制ALC、行人检测系统PDS;后向雷达应用包含盲点监测BSD、变道辅助LCA、后方碰撞预警RCW、开门报警DOW、倒车碰撞预警RCW等等。
视觉传感器(摄像头):智能眼睛,精准识别目标物
车载摄像头可以采集图像信息,与人类视觉最为接近,它是自动驾驶的眼睛,通过采集的图像,经过深度学习算法分析,能够精准识别丰富的环境信息。
和激光雷达、毫米波雷达主动发出电磁波不同,摄像头是像人眼一样,被动地接收可见光。相比其他传感器的优势很明显,摄像头是唯一可以读取“内容”信息的传感器,障碍物类型、交通标识、信号灯颜色通通归他搞定,所见即所得,通过算法加持还可以实现车距测量、道路循迹,从而实现前车碰撞预警和车道偏离预警。
摄像机根据镜头和布置方式的不同主要有四种:单目摄像机、双目摄像机、三目摄像机和环视摄像机。
一般来说,只有一个摄像头(单目)的时候采用近大远小原则测距,结合传感器尺寸,通过对比图片中物体的像素大小和样本库中相同物体大小,估算目标距离,这就要求在估算距离之前首先对目标进行准确识别,还要不断维护一个带真实尺寸信息的样本特征数据库。
而双目摄像头(带2个摄像头)的检测方式是通过对两幅图像的视差进行计算,无需进行目标物图像识别,更像人的眼睛。
在自动驾驶领域,摄像头用得最多、机器视觉玩得最溜莫过于特斯拉。特斯拉的自动驾驶是以视觉主导的,其他传感器仅是辅助。标配是8个摄像头,前面一个三目的总成件,后面一个倒车摄像头,两侧各两个来保证变道、合流、出高速。

但摄像头也有局限性,一是识别所消耗的算力巨大,多个摄像头同时处理的话,消耗的GPU资源不少,而且识别率不能保证100%(目前识别率约95%),仍需大量数据训练提升;二是视觉总归是二维的,摄像头成像将三维世界映射成二维照片,丢失了深度信息,不能直接给出距离,特斯拉之前一直就仅将毫米波定位为一个辅助的传感器,结果撞了大卡车。

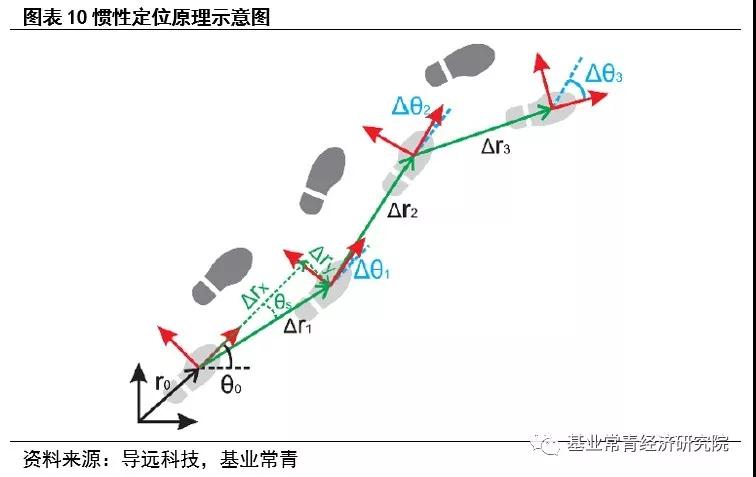
惯性导航:高精定位,提高自动驾驶安全性
在自动驾驶系统里,除了需要精准感知环境外,还需要高精定位,而惯性导航在自动驾驶定位系统中就发挥着重大的作用。当车辆在高速路上行使时,如果有急弯道,用激光雷达或视觉传感器去判断,车辆需要在快接近这个弯道时才能做出响应,容易造成急刹车、急转弯等现象,给驾驶的安全性和舒适性造成影响。而使用惯性导航,可让车辆对自己的实时位置有清晰的了解,可以通过智能决策系统去判断,什么时候、提前多少米开始刹车,什么时候应该转向以及转多大的角度等等,从而提升整个驾驶系统的安全性和舒适性。
惯性导航依靠惯性传感器(加速度计和陀螺仪),获得每一刻的加速度和角速度信息,并通过时间积分,得到速度和角度,再通过空间累加,推算出车辆实时位置与姿态信息。
因此,惯性导航有着其他传感器都无法比拟的优势——可以不依赖外部信息,完全不受环境与天气的影响,提供实时定位及姿态信息。但局限性是,定位误差会随时间而增大,工作之前需要校准。另外,符合自动驾驶要求精度的惯导价格很高,达到20万元人民币。
其他传感器:进一步提高自动驾驶的安全性及稳定性
综上,激光雷达提供精度信息,毫米波雷达辅助全天候工作,摄像头提供内容信息,惯性导航实现精准定位,基本上可以满足自动驾驶感知环境的需求了,但自动驾驶对安全性及稳定性的要求极高,所以还需要加入其他传感器作为补充,包括红外传感器、超声波传感器等等。
举例红外传感器。红外传感器被称为“夜视之王”,而基于红外的夜视系统,利用红外光波检测物体自然发射的热量差异,可以检测到可见光摄像头、雷达和激光雷达不能识别的物体。至关重要的是,它们在微光和恶劣天气的情况下表现依旧良好。

结语:
特斯拉CEO马斯克曾言:"只有傻瓜才会用激光雷达"。还吐槽谷歌在其自动驾驶汽车中使用的激光雷达没有意义...

对于自动驾驶,不知多少人会与我一样,觉得车上顶个“大块头”激光雷达特别丑,这么说来,激光雷达体积过大,影响车的美观,很可能是马斯克不用它的原因之一。
但从自动驾驶的安全性来考虑,目前,加入高精度可绘制3D地图的激光雷达才是明智之举。不可否认,特斯拉算法一流,但二维的视觉传感有时是会骗人的,算法也存在出错可能,比起好看,命比较重要。
当然,我更期待未来用于自动驾驶的传感器能成本更低、分辨率更高、探测范围更大、体积更小...
