IMU惯性测量传感器在我国管道检测机器人中的应用
在2019年5月26日召开的中国国际大数据产业博览会上,贵州省水利院带着一款管道检测机器人首次参展。据了解,该机器人专门用于堆石坝的内部变形监测,借助内部的IMU惯性传感器测量装置,可实时反馈监测数据,使大坝变形问题能够早发现、早修复。下面,就请各位跟随传感器专家网小编一起来了解一下。

贵州省水利院带来的管道检测机器人,资料图
堆石坝,是一种用于截河拦水的堤堰,大坝在施工期和运行期都会出现内部变形,是安全监测的重点和难点。在大坝修建初期,建设方可预先在坝体高程2/3处(坝体最容易变形的地方)埋入一种特殊材质的U型管道。后期测量时,只需在预设管道内放置管道机器人,通过测量管道的三维曲线而到大坝内部变形的数据。
据了解,该管道测量机器人由深圳大学牵头,贵州省水利院参与设计,主要由行走单元、里程测量单元、惯性测量装置和集成控制单元组成。行走单元采用同步对中结构,保证车体对中到管道轴线上;里程测量单元采用三个独立伸缩测量轮,增强系统鲁棒性。
另外,该管道测量机器人内置有惯性测量单元(IMU),内置有高精度的加速度传感器和陀螺仪等传感器元件,可测量车体运动加速度和角速度,从而协助机器人进行精确转向;集成控制单元对多传感器数据进行集成采集。目前,管道机器人已申请发明专利,并准备在贵州省科技厅立项。
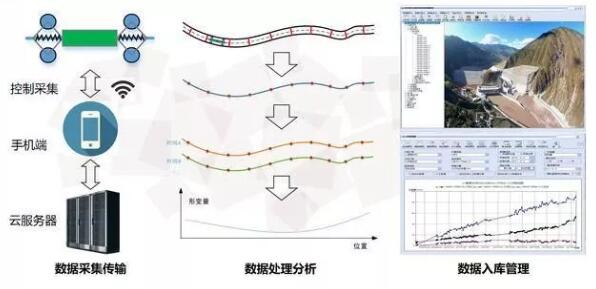
大坝数据采集系统,资料图
据管道测量机器人研发者深圳大学校长、国际欧亚科学院院士李清泉介绍,过去监测水坝是采用水管式沉降仪测垂直位移、引张线式水平位移计测水平位移两种方法,但是当供水线路较长时,水管式沉降仪容易造成管路堵塞,而引张线式水平位移计的铟钢丝容易断裂造成回弹,并且这两种传感器采用的是点式测量,而不是连续观测,无法得到内部的整体变形结果。
目前,该管道测量机器人已经用于贵州两个新建大坝,其中,正在修建的夹岩水利枢纽及黔西北供水工程已预设管道,待工程竣工后即可开始实施监测;从江县宰章水库坝自2017年起开始实施监测,每月对坝体内部情况进行一次数据传送,并将数据通过后台程序处理生成成果报告,便于有关部门及时根据风险程度采取对应措施。
以上便是传感器专家网为大家介绍的IMU惯性测量单元这种惯性测量传感器技术,在国内管道检测机器人中的具体应用实例了。今后,传感器专家网将继续为各位带来更多关于IMU传感器在机器人姿态检测、行走转向等功能中的具体应用,敬请期待。
