振动、冲击、加速度传感器性能术语详解
●电压灵敏度
在承受单位激励时输出的电压量。
●电荷灵敏度
在承受单位激励时输出的电荷量。
●横向灵敏度
在与传感器敏感轴垂直的任意方向受到单位激励时,传感器获得的信号输出量。又称侧 向灵敏度或交叉轴灵敏度。
●横向灵敏度系数

●基座应变灵敏度
由传感器的基座产生的单位弯曲应变而引起的不希望有的信号输出。
●磁灵敏度
传感器在磁场中,单位磁场强度变化所产生的不希望有的信号输出。
●瞬变温度灵敏度
传感器受到瞬时温度变化(每°c)时产生的不希望有的信号输出。
●声灵敏度
传感器在一定的声压作用下产生的不希望有的信号输出。
●零漂
在冲击完成之后,加速度计的输出仍不回零的现象。
由于环境条件的变化(如温度),传感器不工作时,其输出发生偏离零点的现象。
●波形失真
波形发生不希望有的变化。
●频率失真
在给定频率范围内,由于频响特性不好而引起的波形失真。
●相位失真
由于传感器的输出与输入间的相位角不是频率的线性函数时而引起输出的波形失真。
●传感器相位移
正弦激励时传感器的输出与输人之间的相位差。
●频率范围
在规定的误差条件下,传感器可以正常工作的频率区间。
●温度极限
阻尼比小于0. 1的传感器在极限温度下,至少恒温4小时以上,其性能符合规定要求的最 高和最低温度。
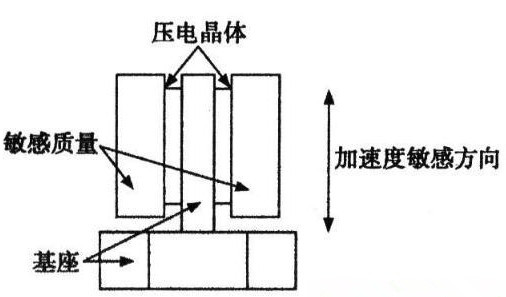
加速度传感器原理示意图
●加速度范围
在规定误差条件下,传感器可以正常工作的加速度区间。
●加速度极限
在规定的性能指标范围内,传感器能承受的最大加速度值。
●模型方程
模型方程是描述加速度计通过检测质量所敏感的输人加速度与输出量之间关系的数学表达式。
模型方程通常可以写作一个级数,它把加速度计的输出量与平行和垂直于加速度计输人基准轴的加速度分量用数学关系式表达出来。
线加速度计的模型方程为

式中,a——加速度计所指示的加速度;A0——加速度计的输出量沖;ai——平行于输人基准轴和外加加速度;ac——垂直于输人基准轴的外加加速度;K0——偏值;K1——标度因数;K2—— 二阶非线性系数;K3——三阶非线性系数;Kc——交叉轴灵敏度;Kic——交叉耦合系数。
模型方程的系数可以是其他变量(例如电压、温度、时间、角速度等)的函数。对这个级数,根据加速度计的不同精度要求,可以只取必要的几项,使它能够表示加速度计对外加加 速的响应。
●偏值
偏值是当没有加速度作用时,加速度计的输出量折合成输人加速度的数值。偏值在模型 方程中以k0表示。偏值也有人称为零偏值或零位输出。
●标度因数
标度因数是加速度计输出量的变化对想要测量或施加的输人量变化的比值。加速度计的 标度因数由所选择的模型方程的系数(通常为K1)表示。标度因数又称为刻度因数或刻度系数。
●二阶非线性系数
二阶非线性系数表示加速度计输出变化与平行于输人基准轴的外加加速度平方之间关系 的比例常数。在模型方程中,二阶非线性系数以K2来表示。
●三阶非线性系数
三阶非线性系数表示加速度计输出变化与平行于输入基准轴的外加加速度三次方之间关 系的比例常数。在模型方程中,三阶非线性系数以K3来表示。
●交叉加速度
交叉加速度是在与输人基准轴相垂直的平面内作用的加速度。
●交叉轴灵敏度
交叉轴灵敏度是建立加速度计输出量的变化与交叉加速度之间关系的比例常数。这种灵 敏度可以随交叉加速度的方向而变化。交叉轴灵敏度在模型方程中以k0表示。
●交叉耦合系数
沿加速度计的输人轴及其垂直方向都有加速度作用时,加速度计的输出中有一项与这两 个加速度的乘积成比例,这个比例系数称为交叉耦合系数。这种系数随着交叉加速度的方向而变化。交叉耦合系数在模型方程中以Kic表示。
●摆性
摆性是检测质量和从检测质量的质量中心沿摆轴到枢轴距离的乘积。
●死区
死区是指输人极限值之间的一个区间。在这个区间内,输人变化不引起输出的改变。死 区也有人称其为非灵敏区或钝感区。
●输入极限
输人极限是输入量的极限,通常为正的和负的。在这个极限内变化时,加速度计具有规定 的性能。输人极限对线加速度计来说通常以g来表示。
●输出量程
输出量程是输人量程与标度因数(刻度因数)之积。
●零位电压(零位输出}
零位电压是对应零偏值的输出值,它可以用均方根值、峰-峰值或其他电测量值来表示。
●电零位
电零位是传感器对应于零位电信号时的角度位置或线性位置。
●机械零位
机械零位表示在没有外加加速度的情况下检测质量的位置。这个位置通常是在开路条件 下测定的,而对于某些类型的加速度计来说,这个位置可能是不定的。
●滞环误差
当输人在全量程内循环一周后,如果在输人增加的方向上某一个输人信号对应的输出值 与在输人减小的方向上该输人信号对应的输出值之差为最大,那么,这个差值称为滞环误差。 滞环误差通常用等效输入来表示。
●误差带
误差带是在规定的输出函数附近包含所有输出数据误差的一条带。它包括非线性、不重 复性、分辨率、滞环误差和输出数据中的其他不确定误差的综合影响。
●综合误差
综合误差是输出数据偏离规定输出函数的最大偏差。综合误差包括滞环误差、分辨率、非 线性、不重复性以及输出数据的其他不确定误差等的影响。通常它以输出量程的百分比来。
