电子罗盘在水下机器人航向测量中的应用
电子罗盘就是利用指南针的定位原理来进行地平方位测量的组件,能实时提供移动设备的航向和姿态。典型的电子罗盘一般由磁阻传感器和倾斜传感器组成。相比传统罗盘,它不受倾斜与震动影响,还可通过其他组件的辅助校正来提升精确度。高精度电子罗盘可对GPS信号进行有效补偿,即使没有GPS信号也不会迷失方向。
我们知道,陀螺仪是通过惯性原理测量角速度,是动态的量。与陀螺仪不同,电子罗盘测量的是通过磁电效应测量地球磁场,并解算出方位角(手表的指向或者与地球磁力线之间的夹角),是静态的量。

水下机器人曾用于2018年重庆万州公交客车坠江事故救援工作中,资料图
水下机器人
水下机器人也称无人遥控潜水器,这种机器人常用于水下较恶劣危险的环境中或人体无法到达的场合中。目前,水下机器人的发明和应用,给水下探物、水下摄影、水下养殖、水下探测、水下科学研究等应用带来了可能性。
由于是无人水下作业因此,水下机器人除了具备有自动控制系统、水下通讯系统和水环境探测系统外,还必须有一套精确的导航定位系统。其中,电子罗盘在确定水下机器人的航向上具有重要的作用。
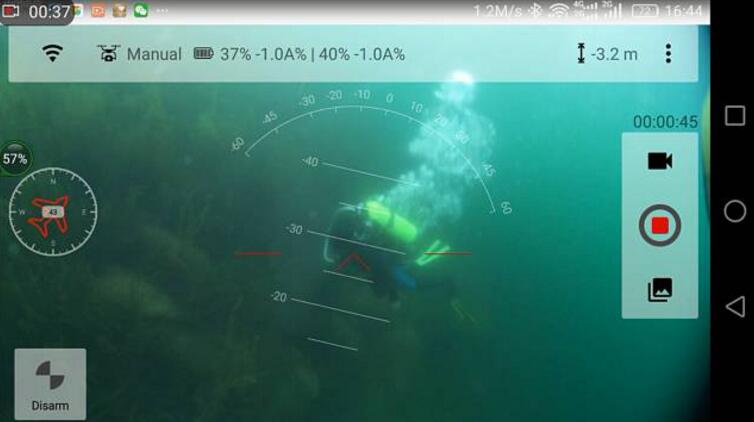
水下机器人航向控制,资料图
水下机器人航向监测
在作业过程中,水下机器人需要通过自动控制系统和通讯系统对其运动进行控制和调节,使其能到达正确的作业地点。而要保证机器人能够顺利到达目的地,就必须对水下位置加以监控和调节。
在此过程中,机器人携带的声纳设备,可用于探测障碍物和靠近的物体,避免水下航行过程中发生碰撞。GPS定位系统用于测量水下机器人的实时坐标位置。
而在水下导航过程中,如果处在静止的情况下,GPS无法给出航向信息,此时,就需要利用电子罗盘进行定向了。目前,水下机器人内置的电子罗盘则, 可对机器人的方位航行进行测量,并将自身航向发送给控制系统,以便同目的地方位进行比较,并作出相应的航行调整。特别是是远程作业时,航向的测量就更加重要。
在为水下机器人选用电子罗盘产品时,应选用具有极其精确航向测量精度的产品,另外,还需要能满足各种实际的测量需求应用。目前,除水下机器人外,电子罗盘还在诸如石油测井、天线指向、车辆导航、姿态系统等众多领域有着广泛的应用,未来,传感器专家网会为您带来这些领域的电子罗盘设备的具体应用,敬请关注。
