MIT开发能自动连接的机器船,构建水上智能交通
传感器专家网6月12日报道,据悉,为缓解城市街道的交通拥堵,发挥阿姆斯特丹运河水上设施的优势,提供水上智能交通,MIT 研究者开发了一种新型锁闭系统,该系统为机器船赋予了新能力:以彼此为目标并连接在一起,如果失败了则继续尝试直到成功,因此,机器船可以克服水流干扰,高效安全地组装在一起。

MIT研究者设计的新型机器船 资料图
新型锁闭系统赋予机器船新能力
该系统的构建目标之一就是提供新的水上交通解决方案。另一个目标是用机器船自动组建桥梁、表演舞台甚至菜场等临时场地。这些由机器船组建的场地可以在固定时间后自动解散,再为某些具体活动而自动组合。此外,机器船还可以用作探测器,收集阿姆的基础设施、空气和水质等数据,为城市和市民健康提供重要信息。
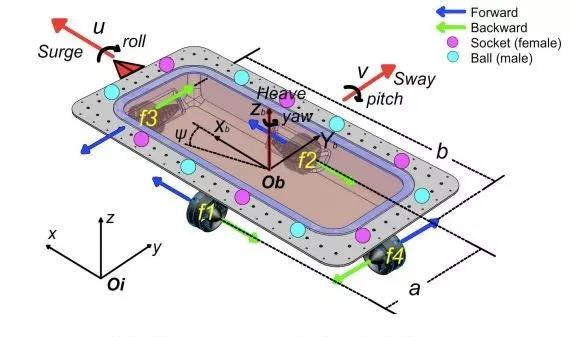
这些机器船的船体是矩形的,配备有传感器、推进器、微处理器、GPS 模块、摄像头等硬件。
机器船内部示意图
如图所示,该机器船船体为矩形,每条边的中间分别有一个推进器(f1、f2、f3、f4)。船顶部是负责感知和定位的 VLP-16 激光雷达。该机器船还配备有摄像头,用于检测标记,以及惯性测量单元装置(IMU),用于测量倾斜角和速率。
MIT 研究者表示,新的锁闭机制对于创建临时水上设施至关重要,机器船的水上自动交通是不需要锁闭机制的,但是创建临时水上设施需要,不管是移动设施还是固定设施。
机器船如何自动连接
每一条机器船配备有多个锁闭装置分布在船体前后及侧面,这些装置包括球和槽组件。球组件类似于羽毛球,形状为圆锥体,橡胶材料制成,顶端有一个金属球。槽组件是一个宽漏斗,可以指引球组件进入接收器。在漏斗中,激光束作为安全系统,负责检测球进入接收器的时间。这就激发了一种机制:槽的三个臂围拢并捕捉到球,同时将表明船只连接已完成的反馈信号发送给两艘机器船。
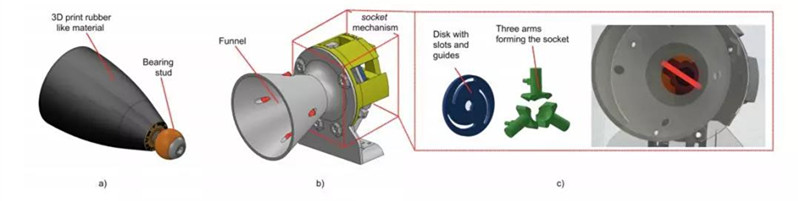
机器船锁闭装置中球组件和槽组件图示
在软件方面,支持机器船运行的是自定义计算机视觉和控制技术。每条机器船都有一个激光雷达系统和摄像头,因此它们可以实现在运河道中点到点的自动移动。每一个停靠点(通常是不动的机器船)都有一些印有 AR 标记的纸,这些标记叫做 AprilTag,类似于简化版的二维码。AprilTag 常用于机器应用,它可以使机器人检测并计算标记的准确 3D 位置和方向。
AprilTag 和摄像头都安装在机器船中心的相同位置。当一条正在移动的机器船离静止 AprilTag 一两米远时,机器船会计算 AprilTag 的位置和方向。通常,这会生成船移动的 3D 地图,将 3D 空间简化为易于计算的 2D 平面,它可以衡量机器船摄像头与标记的距离和方向。基于这一信息,机器船能够朝着标记前进。然后通过使摄像头和标记完美对齐,来实现机器船的精确连接,如下图所示:
锁闭系统假设机器船和停靠点是在相似水平线上的,而漏斗可以弥补机器船上下颠簸和起伏造成的不对齐。
这些机器船可以识别停靠点并与之连接。控制算法指引机器船向目标行进,它们可以自动连接至定制化锁闭装置,且精度可达毫米级。此外,当机器船注意到自己没有与停靠点成功连接时,会重新开始尝试。
目前,研究者正在设计当前版本四倍大小的机器船,这样它们在水上更加稳定。
