自动驾驶汽车技术应用:多种传感器驱动导航和驾驶
随着谷歌等公司的重大发展和进步,自动驾驶汽车受到了广泛关注。虽然目前在公路上广泛使用自动驾驶汽车可能还需要数年时间,但这些车辆已经开始逐渐被使用在其他“受限制”的场所中,例如露天矿和农业。

图1:谷歌一直在对自动驾驶汽车进行广泛的道路测试,包括定制汽车和改装标准汽车
使自动驾驶汽车成为可能的许多技术应用中,包括传感器和执行器、复杂算法以及执行软件的强大处理器。
自动驾驶汽车中的传感器和执行器分为两大类:1)导航和引导类传感器(确定所在的位置、想去的地方、如何到达那里);2)驾驶和安全类传感器(指导汽车、确保汽车在任何情况下都能正常行驶,并遵守道路规则)。
这两个类别有数十个子系统和数百个专用传感器通道。今天我们将带大家仔细了解自动驾驶汽车中的一些子系统以及用于构建这些子系统的传感器。
自动导航和引导中的GPS接收器、IMU以及MEMS传感器等
解决导航和引导的问题是自动驾驶汽车存在之初就需重视的方向。因为它将提供两个关键的数据信息:汽车所处的位置,以及汽车可以到达想要位置的路径。
以前,罗盘、六分仪、LORAN无线电定位和航位推算等仪器和技术都已被使用在常规驾驶中,其精确性、一致性和可用性都各不相同。
而对于自动驾驶汽车来说,导航和指导子系统必须始终处于激活状态,并需要时刻检查车辆相对于目标的运行情况。例如,如果最初的“最佳”路径有任何意外的偏离,则必须实时重新计算路径,以避免走错方向。这与简单地在A和B之间绘制直线相比需要更多的计算工作量,因为自动驾驶汽车易受道路的限制,要进行更复杂的路径。
用于导航和引导的主要子系统基于GPS(全球定位系统)接收器,该接收器主要依靠60多颗低轨道卫星星座中至少四颗卫星对接收的信号进行复杂分析、计算当前位置。GPS系统可以提供大约一米的定位精度(实际数字取决于许多细微问题),这对于自动驾驶汽车来说是一个良好的开端。不过需要注意的是,对于希望随时行驶的驾驶员,GPS接收器需要30到60秒才能建立初始位置,因此自动驾驶汽车必须延迟出发,直到GPS计算出第一个修正值。
GPS子系统现在可作为芯片(SOC)集成电路或多芯片组合上的复杂系统使用,这些芯片组不但需要电源和天线,还需要一个嵌入式、特定于应用程序的计算引擎,一同执行密集计算。虽然在集成电路中差不多都有一个1.5GHz GPS信号的内部射频前置放大器,但许多车辆都选择将天线放在车顶上,同时安装一个共同定位的低噪声放大器来使用(LNA)射频前置放大器,并将定位GPS电路放在车内更方便的位置上。
重要的是,天线必须具有右手圆极化特性(RHCP),以匹配GPS信号的极化,同时也可以是陶瓷芯片单元、小绕线短截线设计或其他配置。
目前,虽然GPS是自动驾驶汽车的基本功能,但自动驾驶只有它还远远不够。当GPS信号被峡谷、隧道、无线电干扰和许多其他因素阻挡时,会导致信号中断,这些中断可能会持续数分钟甚至更长时间。为了弥补GPS的不足,自动驾驶汽车有时要使用不需任何类型的外部信号的惯性制导。该惯性测量单元(IMU)由固定在车辆上的平台组成,该平台具有三个陀螺仪和三个加速度计,每对分别朝向正交的X、Y和Z轴。这些传感器提供平台旋转和线性运动的数据,用于计算车辆的运动和位置,无论有任何速度或任何类型的信号障碍都无法防止它的正常使用。
需要注意的是,IMU无法告诉驾驶员车辆所处的位置,只能告诉运动路径,因此车辆的初始位置必须由GPS确定或手动输入。
同时,我们需要意识到,如果没有基于MEMS的陀螺仪和加速度计的开发,车载IMU将不实用。历史悠久且完善的IMU是基于旋转陀螺仪和一个框架平台,它已经很好地服务于许多应用(导弹制导/太空任务),但它对于自动驾驶汽车来说太庞大,成本高昂且耗电量大。
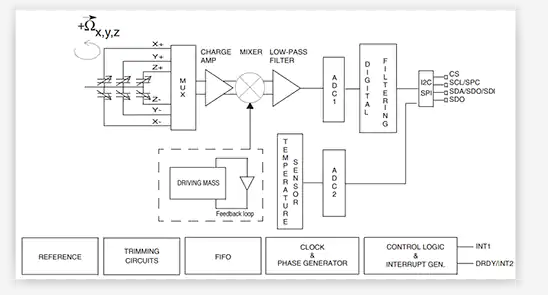
图2: MEMS器件从根本上改变了陀螺仪和加速度计等IMU功能的实现; 这款来自ST的微型IC集成了三个正交陀螺仪,并提供了角度读数的数字化串行输出
典型的MEMS器件是ST 微电子公司的A3G4250D IC ,这是一款低功耗三轴角速率传感器,可在零速率水平下提供高度稳定性,并且在温度和时间内具有高灵敏度,如图3所示。
汽车驾驶与安全中的激光雷达系统与雷达
自动驾驶汽车必须能够看到并解释前进时前方的情况(当然,也包括倒车时后面的情况)。还有必要看看两边是什么情况,换句话说,它需要360?的视角来观察周围的情况。这种情况下,一组摄像机是显而易见的选择,通过摄像机来确定车道的位置,并检测道路上的物体或标记。
但是仅使用相机会带来问题。首先,将存在正确设置多个摄像机并保持其清洁的机械问题;第二,需要进行繁重的图形处理来理解图像; 第三,需要深度感知和基本成像; 最后,光照、阴影和其他因素使得精准确定相机所看到的内容会具有极大的挑战性。
因此,自动驾驶汽车上的主要“视觉”单元多是激光雷达系统,它是光探测和测距的缩写(或光和雷达的混搭)。为了实现自动驾驶汽车所需的分秒决策,激光雷达系统提供了有关周围环境的精确三维信息。使用这些数据,处理器可以实现对象识别、运动矢量确定、碰撞预测和避免策略。激光雷达单元装置非常适合“大图”成像,并通过在车顶上使用旋转扫描镜组件提供所需的360°视角。
激光雷达传感器使用高速、高功率的激光脉冲提供原始信息,激光脉冲与探测器的响应同步,来计算从反射光到物体的距离。探测器阵列或定时摄像机可用于提高三维信息的分辨率。
脉冲一般非常短,以便增强深度分辨率,并且其所产生的光反射用于创建三维点状“云”,该点被分析以将数据转换为体积识别和矢量信息。然后,系统将转换后的结果用于计算车辆相对于这些外部物体的位置、速度和方向,以确定碰撞概率,并在需要时指导车辆进行适当的操作。
不过,激光雷达系统对于近距离控制效果不佳,例如停车、换车道或拥堵交通中,因此,此时系统会由内置在车辆前后保险杠以及侧面的雷达补充。该雷达的工作频率通常为77GHz,具有良好的射频传播特性,并提供足够的分辨率。
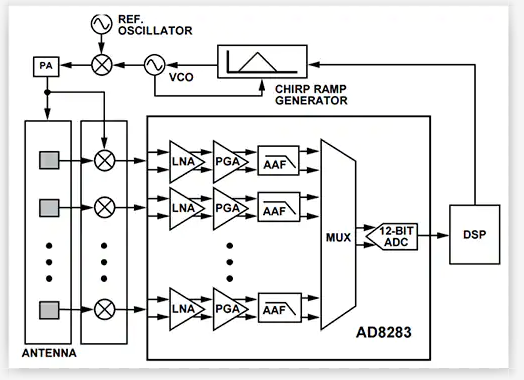
图3: AD8283的雷达系统概述,一个6通道雷达接收路径AFE
为了将雷达安装到平面保险杠组件及其有限的空间中,必须使用高度集成的设计,包括使用部分雷达子系统PC板作为其天线。还需要有源元件,如ADI公司的AD8283,它集成了六个信道的低噪声前置放大器(LNA)、可编程增益放大器(PGA)和抗混叠滤波器(AAF)、ADC通道以及单个12位模数转换器(ADC)。
