比尔盖茨资助的企业推出高性能低成本激光雷达
3月20日,由比尔盖茨(Bill Gates)资助的初创公司Lumotive(专为自动驾驶汽车研发激光雷达系统)宣布,推出颠覆性的光束控制(beam-steering)技术,可显著提高激光雷达(LiDAR)系统的性能、可靠性和成本效益,为新兴的无人驾驶汽车行业服务。
该光束控制技术,可显著提高激光雷达系统的性能。
激光雷达已成为关键的3D感知技术,不仅可支持自动驾驶系统,还支持ADAS,或高级驾驶辅助系统(如车道保持、自动制动和避碰等系统)。激光雷达系统通过发射激光脉冲,测量脉冲往返物体的飞行时间确定与物体相隔的距离。
激光雷达系统可通过扫描或光束控制激光脉冲,在其二维视野上创建一个有关周围环境的3D感知地图或“点云”,三维数据根据在给定的水平和垂直位置上,测量与物体相隔的距离而得出。事实证明,激光雷达对自动驾驶汽车至关重要,因为该技术可以精确定位几英寸至数百码范围内的物体。激光雷达指激光探测和测距,与老式的雷达(指无线电探测和测距)相比,探测范围更短,但是分辨率更高。
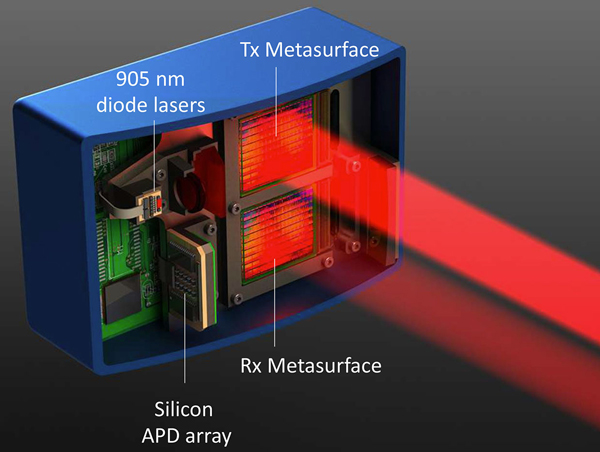
目前,大多数激光雷达系统依靠机械扫描,可靠性差、成本高、形状因素差,最重要的是限制了现有系统的性能。相比之下,Lumotive的光束控制技术使用LCM(LCD显示模组),基于超材料光弯曲原理控制光脉冲的半导体芯片,此次也是该芯片首次用于激光雷达。Lumotive的LCM孔径很大,可改善激光雷达的感知功能,同时由于半导体生产技术成本低廉,可实现低成本的激光雷达系统。该系统初期产品将在2019年第三季度供特定客户进行beta测试。
光束控制技术,是高性能和商业化的激光雷达系统所缺少的环节。传统上,激光雷达依赖于不可靠且笨重的旋转组件,但是较新款的激光雷达传感器利用微电子机械系统(MEMS)反射镜或光学相控阵。但是,由于MEMS反射镜的光学孔径小,相控阵效率低,因而上述两种方法性能都不好。
Lumotive的系统提供了独特的性能优势,包括超大的光学孔径(25*25毫米),可实现远距离探测;120度视野高角度分辨率;快速随机进行光束控制。Lumotive的LCM芯片不包含移动部件,使用成熟的半导体生产技术和液晶显示封装技术制造,可实现低成本、可靠性高、尺寸小,商业化的激光雷达系统。除了具备成本和性能优势,Lumotive的LCM还可以集成至小型的形状因素系统中,对工业和消费领域等其他应用也可从中获益。
