激光雷达技术突破将带动AGV迎来大规模应用
AGV机器人的一个重要标志就是自主导航,从最初开始的磁条导航,到现在的激光导航,GPS辅助导航,惯性导航一直发展,各种导航技术都还有优缺点,目前,各种导航设备及传感器都需要分开安装,单独进行数据处理和调试,没有一个完美的整合的解决方案。

港口AGV机器人
惯性导航系统(INS)是一种不依赖于外部信息、不易受到干扰的自主式导航系统。惯性导航通过测量载体在惯性参考系的加速度,自动进行积分运算,获得载体的瞬时速度和瞬时位置数据,且把它变换到导航坐标系中,从而得到在导航坐标系中的速度、偏航角和位置等信息。
其优势在于给定了初始条件后,不需要外部参照就可确定当前位置、方向及速度。适用于各种复杂地理环境和外界干扰下的精确定位和定向,且能不断测量位置的变化,精确保持动态基准。

苏宁的AGV小车
例如,苏宁的送货机器人和AGV小车采用的便是一种名为多线激光雷达+GPS+惯导等多传感器融合的定位方式。
该技术首先是激光雷达进行环境建图,获得先验点云地图,通过GPS和惯性导航初步确定机器所在的全球位置,再通过激光雷达扫描数据与先验点云地图匹配,获得更为精准的全球位置,实现精准定位和自主导航。在感知层面,激光雷达融合视觉,实时识别周围的行人、车辆和障碍物,为规划出最优绕行路径提供依据等。
不过,苏宁方面也表示,虽然惯性导航技术定位精准、地面处理工作量小、路径灵活性强,但制造成本较高,导引的精度和可靠性与陀螺仪的制造精度,及其后续信号处理密切相关。总之,一种技术手段不能解决所有问题,当前机器人自主导航普遍采用了多种技术组合的模式,以实现优势互补。

激光雷达
最近几年,随着SLAM技术的逐渐成熟,AGV机器人的定位导航也变得更加精准。所谓SLAM(Simultaneous Localization and Mapping),即同步定位与地图构建,最早在机器人领域提出。
它指的是:机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。由于SLAM的重要学术价值和应用价值,一直以来都被认为是实现全自主移动机器人的关键技术。
目前主流的SLAM有两种,一种是视觉SLAM,一种是基于激光雷达的SLAM(Lidar SLAM),通常采用2D或3D激光雷达(也叫单线或多线激光雷达)。
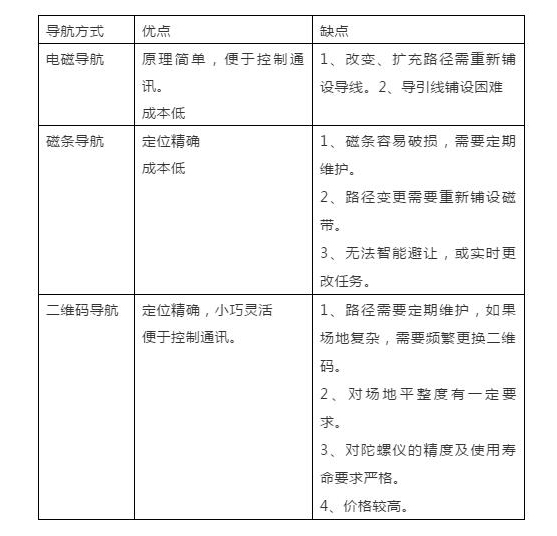
目前常见的AGV导航方式优缺点分析
有分析认为,目前,以导航技术来区别,AGV分为三类:磁条、二维码和激光。而眼下,磁条导航的市场在萎缩,二维码的技术已经成熟,同时也是一个饱和竞争市场,激光还能解决人机协作,当激光雷达国产化,大幅降低成本后,国产AGV机器人产业的高增长将带来进口替代机会,尤其在以激光雷达为主的导航领域。
反过来,随着国内厂商在核心传感器领域的技术突破,激光雷达、电机驱动、电池、控制器等带动AGV整体成本的下降,也将进一步促使AGV迎来大规模应用。
