嫦娥四号成功着陆月球背面!传感器提供精确降落信息
2019年1月3日10时许,嫦娥四号探测器自主着陆在月球背面南极-艾特肯盆地内的冯·卡门撞击坑内,实现人类探测器首次在月球背面软着陆。在此过程中,中国航天科技集团五院研制的测距测速敏感器,通过精确把握速度和距离信息,为嫦娥四号安全降落提供了支持。

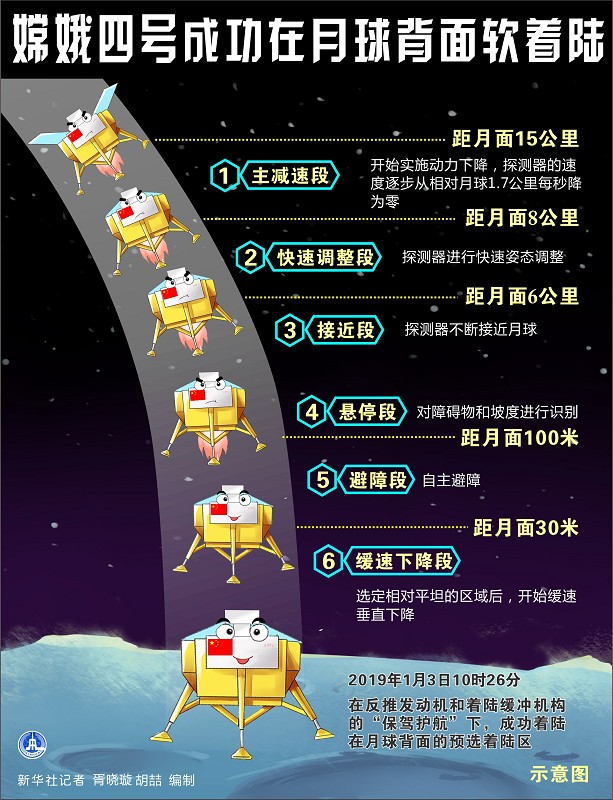
嫦娥四号着陆器降落过程
复杂着陆对自主制控要求极高
中国航天科技集团五院的消息称,相比嫦娥三号,嫦娥四号的落月难度更大。一方面,嫦娥三号着陆区地形起伏仅800米,堪称“平原”;而嫦娥四号着陆区地形起伏达到6000米。更重要的是,嫦娥四号与地面交流需要通过鹊桥中继卫星中转,其间会产生约60秒的延时,这对于瞬息万变的降落过程显然太久。因此落月全程需要由它自主完成。

嫦娥四号着陆器
由于降落的难度大大增加,嫦娥四号的着陆方式也将作出改动。由于着陆地的独特地貌特点,它的避障需求远高于其他着陆任务。
可以看出,在进入准备阶段后,嫦娥四号的轨迹不降反升,而后进入一个几乎要实现长距离垂直下降过程,期间完成避障、悬停、精避障、缓速降落全过程,难度极大。这么一个复杂的“走位”,对自主导航制导与控制要求极高。
软着陆过程示意图,新华社图片
GNC系统控制落月全程
嫦娥四号的成功落月,将我国航天器制导、导航与控制(GNC)技术提升到了新的高度。由五院502所研制的GNC系统,负责嫦娥四号奔月、环月、落月整个过程的控制,特别是近月制动和落月的过程,没有重来的机会,对系统可靠性有着极高要求。
地形崎岖使得此前嫦娥三号的飞行轨迹无法适用,不可见又导致关键阶段地面支持能力有限。在充分研究月面预定着陆区地形特点基础上,502所科研团队设计了适应新地形的落月轨迹方案。为减少对地面的依赖,他们修改了原有设计,大大提高了系统的稳定性和在危急状况下的生存能力;同时完善了故障应对措施,将原本依赖人工处理的故障预案全部放手交给着陆器自行决断,大大提高了故障应对速度。
嫦娥四号探测器巡视器(左)、着陆器(右)、中继星“鹊桥”(上)示意图
测距测速传感器提供精确信息
正如我们开车时需要行车雷达和倒车雷达辅助,引导嫦娥四号落月的GNC系统,也需要各种探测器提供测量参数。五院研制的测距测速敏感器,通过精确把握速度和距离信息,为嫦娥四号安全降落提供了支持。
根据嫦娥四号着陆环境的特点,科研团队对此前嫦娥三号的测距测速敏感器进行了升级和优化。为此他们多次开展吊车试验和校飞试验,通过模拟的方式验证传感器性能是否满足需求。

嫦娥四号着陆器监视相机C拍摄的着陆点南侧月球背面图像,巡视器将朝此方向驶向月球表面。新华社图片
等来落月指令后,嫦娥四号按照GNC系统的指挥,在距离月面15公里高度“定时定量”启动发动机开始减速,在边飞边降的同时迅速调整姿态。在距离月面8公里时,嫦娥四号变为垂直下降,直至最后100米。为了保证着陆时不会掉进坑里或踩到石头,它悬停在空中缓了口气,待选定落脚点后,才缓缓“飘”了下去,整个过程大约耗时10分钟。
此外,五院为嫦娥四号研制了4条强有力的“腿”,也就是着陆缓冲机构,不仅能让它稳稳着陆,还能有效吸收着陆时产生的冲击力,防止它身上的设备被震坏。
