浅谈机器人自主避障中的超声波传感器应用
伴随着计算机技术、传感器技术、人工智能的发展,移动机器的避障及自主导航技术已经取得了丰硕的研究成果,应用领域也在不断地扩大,应用复杂程度也越来越高。移动机器人的自主寻路要求已经从之前简单的功能实现提升到可靠性、通用性、高效率上来,因此对其相关技术提出了更高的要求。
采用超声波传感器的自主避障机器人小车,资料图
其中,移动机器人智能的一个重要标志便是自主导航,而实现机器人自主导航有个基本要求:避障。避障,是指移动机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,最后达到目标点。
移动机器人是如何实现避障与导航的呢?
实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用。避障使用的传感器主要有超声波传感器、视觉传感器、红外传感器、激光传感器等。
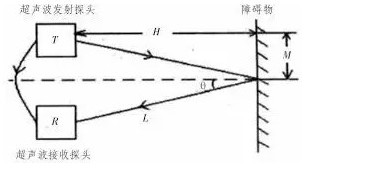
超声波传感器检测避障检测原理,资料图
其中,超声波传感器检测距离原理是:测出发出超声波至再检测到发出的超声波的时间差,同时根据声速计算出物体的距离。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。
超声波传感器一般作用距离较短,普通的有效探测距离都在5到10米之间,但是会有一个最小探测盲区,一般在几十毫米。由于超声传感器的成本低,实现方法简单,技术成熟,是移动机器人中常用的传感器。
