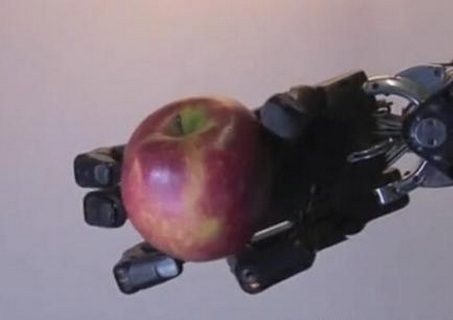
利用电流传感器的机械手能悬空捏住灯泡
2012年,美国宇航局NASA采购了ShadowRobot公司Shadowhand机械手,用以研究其如何开展工作。Shadow机械手从机械加工到制作完成,需要整整三个月的时间,每只机械手重约4千克。据悉,这是一款利用3D相机和位置传感器等多种传感器接拿东西的机械手。
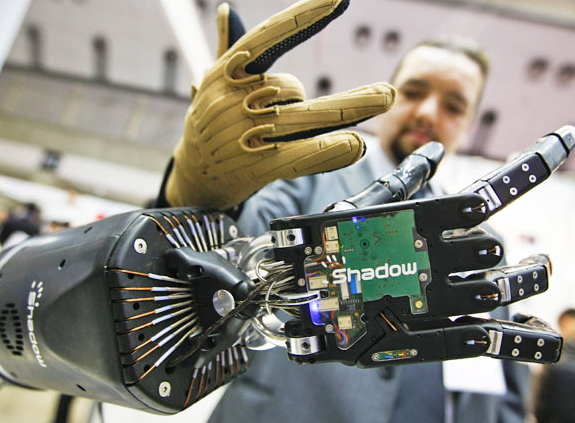
Shadow机械手
Shadow机械手是拥有着电动马达和气动肌肉的机械手,甚至可以参加世界扳手腕冠军赛。40块气动肌肉由众多微型橡胶管组成,被包裹在一个塑料“网兜”中。这些橡胶管在充气的时候开始收缩。通过触觉传感器,Shadow机械手可以轻轻的在你的下巴上挠痒,寻找包裹在沙子中的物体,甚至是拿起一颗鸡蛋。
ShadowHand是一款最接近人手的机械手。该产品具有24种动作,可直接把人体动作绘制到机器设备。它集成了传感和位置控制器,允许外部计算机对其进行准确控制,也可与您现有的机器平台连接使用。
hadowHand含有一个集成了40个“空气肌肉”的储存库,可带动该产品。“空气肌肉”实际上是一种传动装置,具有小巧、轻便、简单和操作方便等特点。该传动器很柔软,无吸附现象,可轻松控制,而且异常有力。ShadowHand有很强适应性,使机械手能够触碰柔软易碎的物体。可以在ShadowHand的指端安装触觉传感器,其灵敏度足以探测到一枚小硬币。
应用范围
适用于医疗、虚拟现实培训和仿真、辅助设计等诸多领域。
技术特征
该产品具有24种动作,可直接把人体动作绘制到机器设备
ShadowHand含有一个集成了40个“空气肌肉”的储存库,可带动该产品
ShadowHand有很强适应性,使机械手能够触碰柔软易碎的物体
驱动器
Shadow机械手有两种驱动技术:第一种电动:每个关节用一个“电动器智能部分“来控制它。第二种是气动:每个关节用一对空气肌肉驱动器来控制它。

传感器
每个指尖里有触觉传感器,每个关节里有位置传感器,都来给系统位置和力量反馈数据。电动器智能部分包含三种传感器:温度传感器,电流传感器与应变传感器。每个空气肌肉驱动器装一个气压传感器。
