遨游深海的潜水机器人:遍布压力传感器等多种传感器
OceanOne是一款类人型机器人,被称作美人鱼机器人。它拥有人类的视力和人造的大脑,还可以借压力传感器等元件提供力量反馈,能够潜入数百英尺深的海底。最近,其处女航收获颇丰,成功从路易十四的月亮号沉船中打捞了一些宝藏。从1664年起,这艘船就一直沉睡在99米深的水底。

OceanOne潜水机器人协助打捞深海沉船,资料图
在水面一位操控人员的控制下,OceanOne对这艘位于法国南部海岸处的沉船展开了探索。据悉,这处沉船遗址处,发现了一个先前被探测到的葡萄柚大小的花瓶。而这款机器人的处女航的目标便是打捞这个花瓶。
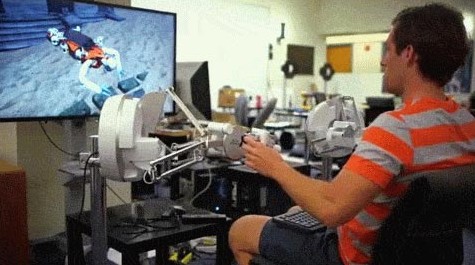
操控人员在操控OceanOne机器人,资料图
操控人员用一组操控杆来控制OceanOne机器人,先是让它在花瓶上方徘徊,感受花瓶的轮廓和重量,然后伸出一根手指,将花瓶勾住。这一系列动作是在力传感器的帮助下实现的。传感器可以把触觉反馈传递给控制员。研究人员称,这些传感器非常敏感,他们甚至可以亲自感受到物品的重量和手感。
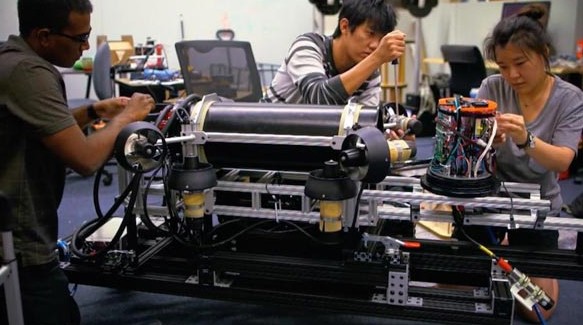
斯坦福大学实验室研发人员,资料图
在勾住花瓶之后,操作人员让机器人将花瓶轻轻地放入一个篮子中,然后将它安然无恙地提出了水面。
据了解,这款美人鱼潜水机器人由斯坦福大学研发,长约1.5米,拥有立体视觉。该技术能够让控制者“看见”水下的世界,就好像真的身临其境一样。它还有两条灵活的胳膊,还有一块作为“尾巴”的区域,电池、计算机和八台多方向推进器就安装在这里。推进器能让机器人固定在一处不动,不会被海水冲走。
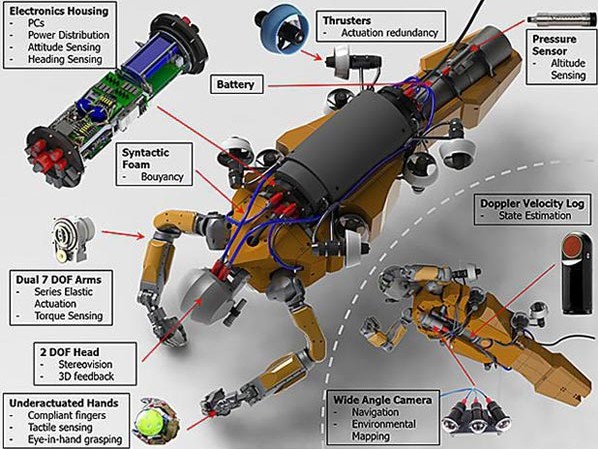
OceanOne潜水机器人身体构造示意图,资料图
此外,每条胳膊的腕部装有力传感器,能够向控制者进行实时反馈,让他们感受到物体的存在。除了可抓取物体的手部上面有许多摄像头外,机器人的全身都分布着各种各样的传感器,包括压力传感器、扭矩传感器、航向传感器等等。这些传感器能够对周围的水流和湍流进行监测。例如,在机器人构造示意图中,我们可以看到,机器人身上的压力传感器可间接提供海水深度感知。
在工作时,机器人会用传感器和摄像头测量周边环境,收集一种算法所需的数据,防止机器人撞上其它物体。如果机器人感觉到前方有障碍物,并且无法减速的话,它就会通过计算来抵御冲击。今后,这款OceanOne还将对深水中的珊瑚礁进行研究,研发人员也会借此进一步提高其双手的灵活性和敏感度。
