波士顿动力机器人后空翻动作背后的传感器与动力控制算法
2017年11月,波士顿动力发布了一段机器人后空翻的视频。对此,东南大学仪器科学与工程学院院长宋爱国,在接受媒体采访时,通过对Atlas的动作进行技术分解,梳理了支撑它的背后的传感器、动力控制算法等技术。
Atlas机器人在表演后空翻。资料图
一个后空翻动作,最难的是哪一步?起跳、翻转、落地,还是稳住?
宋爱国说,首先要有力量。他解释称,想翻转,跳起来了,但是力量不够大,就不能给翻转足够的时间,也谈不上动态的调整,因此动力是后空翻能够完成的基础。第三代Atlas并不是告别外接电源的第一代。资料显示,波士顿动力2016年推出的第二代Atlas就配备了内置电池驱动,不再需要外接电源获取动力。
瞬间给力会更大,就像人要调集自己肌肉内部的ATP储能一样,翻转开始时的爆发力对电池的要求更高。宋爱国提醒,在关注传感器、算法等人工智能研究的同时,也要关注动力等基础研发,机器人的研制是一个全链条的工作。在机器人的体内会有姿态传感器,也就是陀螺仪。
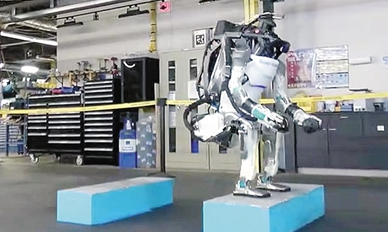
Atlas机器人在准备起跳,资料图
Atlas用到的传感器与动力控制算法
宋爱国说,通过陀螺仪,它能知晓自己的空间方位。与生物判断自己的方位和姿态不同,人类的平衡感知集中在小脑部位。而机器人的平衡感知是分布式的,通过陀螺仪分布在它的躯干上。
宋爱国进一步解释说,它一跳,腿部跟着摆动上来,然后翻转,整个身体的姿态也随之调整。这其中便是姿态传感器在起作用,姿态传感器获取了各部位的旋转状况,将信息传递到中央处理器,进行控制决策。而且控制的实施要快,因此对算法的有效性要求很高。
决策的具体过程可分解为:将姿态转换成数据,进行计算处理,找到应对策略,传递给不同部分,控制姿态,获取平衡。可以想见后空翻的所有计算要在“慢飞行”的情形下完成,因此控制算法优化极考验功底。
据了解,目前很多学校都在拿这款机器人做硬件平台,然后研究控制算法。有机器人领域的研究者介绍说,波士顿动力控制算法已成为院校的典型范例,被用作教材。

Atlas机器人能够完成后空翻动作,仰赖于传感器及它的动力控制算法。资料图
Atlas的落地平衡控制
此外,落地的平衡控制是较难完成的环节。这一过程中,刚性接触和柔性接触分别要采用不同的模型,还要设计二者的兼容模型。宋爱国说,为了给这个大家伙输出足够的动力,也为了减少落地对它的缓冲,Atlas的腿部装了液压伺服器。两个细长的桶状装置,装在腿部,将刚性接触转化为柔性接触。
宋爱国说,目前的驱动部件,有电机、有气压、有液压,后两种能够降振减压,它们不会因为瞬间冲击力的增加而爆掉,而且输出动力也足。但是,在算法控制上,液压伺服的数学模型是非线性的,力量不会随着电压的增长而线性增长,控制的精度会低一点,因此,机器人的脚部也会安装多维力传感器,来对脚步的受力状态进行辅助控制。

波士顿动力公司,资料图
关于波士顿动力
据悉,关注Atlas的业内人士,也很乐于八卦波士顿动力公司的波折经历。它早期在军方拿到了巨额的研究经费,后被谷歌收购,之后又被谷歌卖给日本软银公司,支持经费是其中的重要因素之一。
有人在知乎爆料称,波士顿动力特别有钱,认识在该公司供职过的研究人员,得知波士顿动力每周都要做机器人实验,把机器人搞坏,然后发现问题并改正,因为有钱、有经验,所以他们一周之内就能把机器人修好,下一周继续做,全年无休。
可见,仿生机器人是个费钱又费工的研究。近年来,我国也在仿生机器人领域有了值得一提的研究。
国内正在起步的机器人研究
2017年4月,百度主办的创新挑战赛上,南京大学、西南科技大学等联合研发的“蜘蛛侠智能救援队”亮相,能在复杂的路况中稳定行走,相互沟通协作且简单自主运动。8月召开的机器人大会上,由清华大学计算机系研发的“数据机械手臂”,在人穿上带有传感器的手套后,机械手臂会“零延迟”同步响应动作。此外,中国科学技术大学、新松机器人公司等在四足机器人足球、7自由度协作机器人等方向都有相关研究进展。
宋爱国介绍,在军方相关部门有进行四腿大狗的研究团队,山东大学有研究两腿直立行走的团队,但与波士顿动力相比,我国的机器人研制深度和水平还有较大差距。
