新型人造皮肤传感器为机器人实现触觉感知
据国外媒体报道,美国加州大学洛杉矶分校和华盛顿大学的研究人员共同创造出了一种新型人造皮肤,可让机器人拥有与人类一样的触觉,从而更好地抓取物品。据了,这种人造皮肤其实是一种柔性传感器,可以跟随机械部件或假肢的动作拉伸,并且具有抗震动和抗剪切力的效果。
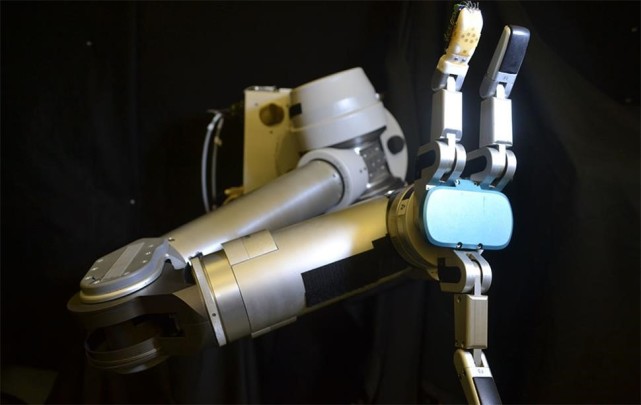
专为机器人机械手设计的人造皮肤,资料图
触觉是机器人技术最重要的组成部分,有了触觉感知,机器人就能够分辨出不同的压力大小,然后选择施加不同的压力。而如果能够检测物体是否会从自己的控制中滑落,就有助于机器人更牢固的抓住目标。而感知物体压力是操作类机器人最重要的技术之一。
现有的机器人或假肢所配备的触觉系统,通常只局限于触觉的某个方面,而这种新型人造皮肤能够提供3D触觉感知效果,剪切力、震动和正常施加的力。而这种皮肤是通过硅橡胶制成。据华盛顿大学研究人员的介绍,在这种皮肤内部是液态金属,而且里面还有非常细微的通道。
与普通固体电线不同,使用液态金属,能够让人造皮肤在不破坏线路的情况下无限延伸。而金属在通道内部的流动取决于不同的角度,而不同的操作过程可以施加不同的电阻,并且这也与不同水平的震动或力相关联。
研究负责人Jianzhu Yin表示,这种电子皮肤就像人类的手指和传感器,能够测量剪切力和不同的物理位置,然后通过传感器实现与人类手指类似的抓握动作。
延伸阅读:深圳先进院制备出新型柔性压力传感器
2017年下半年,中国科学院深圳先进技术研究院的先进电子封装材料科研团队,研发出一种新型柔性压力传感器。目前,相关成果已发表在《ACS》杂志上。
柔性压力传感器是一种用于感知物体表面作用力大小的柔性电子器件,可贴附于各种不规则物体表面,在医疗健康、机器人、生物力学等领域有着广泛的应用前景。随着科学技术的发展,柔性压力传感器能否兼具柔韧性和准确测量压力分布信息等功能,成为人们关注的焦点。由于微结构不仅能提高传感器灵敏度,还能更快地恢复传感器的弹性形变,具备快速响应能力。因此,构建微结构是提高柔性压力传感器综合性能的有效途径,成为学术界和工业界的关注重点。

聚合物胶体微球阵列与复制得到的微阵列结构 PDMS 柔性基底(上);微凸点柔性压力传感器的传感性能(中)及其对微弱空间压力分布测试(下)。资料图
科研团队巧妙利用聚合物胶体微球自组装阵列作为模板,通过两步复制制备了具有微凸点阵列的柔性基底。相对于传统光刻技术制备微结构硅模板的方法,该研究采用的全化学法无需依赖昂贵的光刻设备及复杂的光刻工艺,具有制备工艺简单、成本低,可通过胶体微球粒径的选择来调控柔性基底微凸点的尺寸等优势。所制柔性压力传感器具有高灵敏度、快速的响应时间和良好的稳定性,对低压段压力具有较强灵敏性等特点。
