直流电机驱动器能量回收
品慧电子讯当永磁电机驱动器减速时,存储在机械系统里的能量会通过电机驱动返回至电源。如果无法正确计算出这部分能量的大小,则会引起电源电压升高,从而损坏电机驱动器或系统其他部件。
本文将探索如何安全地消除此种能量。为简化操作,我们选用直流有刷电机为例,当然,给出的方案同样也适用于无刷电机系统。
能量守恒
能量守恒定律,物理学基本定律——能量既不会凭空产生,也不会凭空消失。
物体(如质量)通过移动或旋转而产生动能。在电机系统中,动能来自于为电机供电的电源,电机产生转矩以加速质量运动。
在电机转子的惯性和与电机相连的机械系统中都有能量储存。简而言之,可以将机械系统设想为与电机轴耦合的飞轮(见图1)。
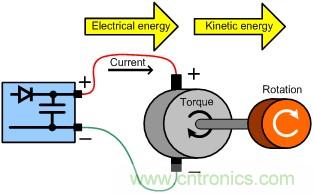
图1:机械系统中的“飞轮”
这里可根据公式 ½ Iω2 计算出动能,其中 I 为惯性力矩,ω 为角速度。速度越快或惯性越大,则储存的能量就越多。
很明显,意思是说物体的运动需要能量。然而,反过来,当你想停止运动时会发生什么呢?当正在运动的质量停止或减速时,它所储存的能量必然有所去处,那么,这些能量会去哪儿呢?
当切断旋转电机的电源时,运动质量中储存的能量会消散到系统的机械损失中。由于摩擦力的影响,大部分能量被转化成了热能(见图2)。除非摩擦力很大,不然电机停止的速度也会很慢。此时,驱动电机由电动状态转变为发电状态,但由于没有电流路径,便也没有电磁转矩来帮助停止电机。
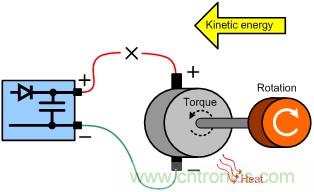
图2:电机停止转动时的摩擦力
若能为电流提供电流短路输出路径,则电流会产生与旋转方向相反的转矩(见图3),这样就可以使电机快速停止。但此种情况下,制动产生的能量会被消耗在被短接电机的绕组电阻和电流路径中的电阻上,进而会以热量的形式散发。
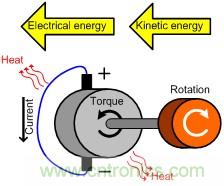
图3:与旋转方向相反的转矩
此种方法有时也称作“短路刹车”。实际上,短路通常是指通过打开H桥的下管MOSFET来提供电流路径。
当控制系统想要快速降低电机速度时,施加在电机上的电流极性会被反转,以提供与之转动方向相反的转矩。然后,储存的动能可通过电机驱动电路返回至电源。
如果电源是一块完美的电池,那么能量就会回流到电池中并被加以回收。而现实情况并非如此,电源通常为直流电源,除非该电源经过特殊设计,否则只能产生电流。由于直流电源无法吸收电流的特性,回流的能量只能进入作为电源一部分的电容中。
电容器中储存的能量可通过公式 ½cv2计算得出,其中c为电容,v为电压。能量流入电容器后,电容器上的电压必然会增加(见图4)。
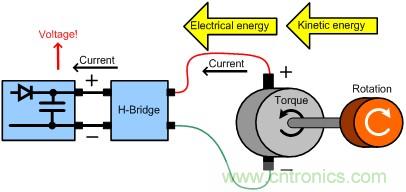
图4:能量增加后,电容电压也随之增加
如果该能量比较小(速度慢或惯性小),那么此时电压的增加可以忽略不计。可有时,若能量太多或电容容量不够,电压可能会升至破坏性水平。这将会损坏电机驱动电路或其他接至相同电源的电路。
能量耗散
有几种方法可以处理回流到电源中的能量:一种是在电源处放置大电容器。此种方法有时会被采用,但大多数情况下,由于物理或成本的限制,大电容器并不实用。
另一种解决方法是采用半导体钳位装置跨接至电源,比如TVS或齐纳二极管(见图5)。当电源电压超过正常工作电压时,使用钳位装置击穿电压。当再生能量导致电压上升时,钳位装置可击穿电压以保护系统。返回至电源的能量在钳位装置中以热量的形式消散。
若能量大小适中,此解决方案非常受用。
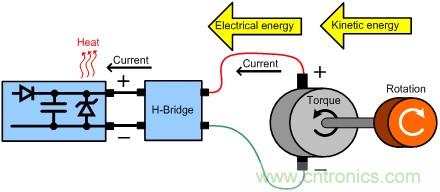
图5:采用半导体钳位装置耗散能量
在大型系统中,使用简单的钳位装置往往效果并不乐观,因为需要耗散的能量过多。此时,可以使用有源箝位电路将能量耗散到电阻负载中。
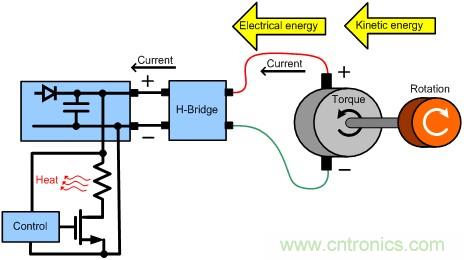
图6::采用有源电路钳位装置耗散能量
钳位电路通过使用比较器或类似电路,监测电源电压来工作(见图6)。如果电压增加至预设阈值(刚刚超过正常工作电压值),可以在电源上跨接一个负载电阻,以耗散能量。
结论
本文针对如何将能量从电机反馈回机械系统的电源,以及如何处理电机驱动电子设备中的此类能量,进行了宏观阐述。文中虽未给出固定系统中元件值所需的数学计算公式,但关于电容值和钳位元件的计算等更多详细信息,您可访问MPS官网之应用说明AN132 “输入电容和过压保护电路设计” 进行参考。
推荐阅读:
相控阵天线方向图——第1部分:线性阵列波束特性和阵列因子
将MOS晶体管连接为二极管
MOS晶体管共源极放大器
多轴机器人和机床应用中的时序挑战
为单极负电源增加高效的正供电轨
