无刷直流电机的超前角/导通角
品慧电子讯在无刷直流电机BLDC控制里,无论对于带传感器还是无传感器电机,经常会用到超前角/导通角(Lead Angle)。因为电机线圈是感性负载,所以相对于线圈上的加载电压,线圈里的电流会有一定的时延,这会影响电机的效率和产生噪音震动等。
对于BLDC的梯形波/方波控制,调试并选取合适的超前角能在不改变基本控制算法的情况下,明显提升电机控制的效率和震动噪音水平。特别对于带传感器电机,控制时序里的超前角相当于调整电机内部的传感器位置,从而通过用简单易行的软件方法实现等同于以不方便或困难的方式调整传感器物理位置的效果。
1、三相BLDC控制原理(梯形波)
下图表示了无刷电机梯形波控制算法的基本原理。首先,交流电整流为直流电压,后级为变频部分(inverter),包含6个开关器件(FET):上桥臂的U、V、W和下桥臂的X、Y、Z。
按照一定顺序控制这些FET开关器件,比如:
1:U->Y
2:U->Z
3:V->Z
4:V->X
5:W->X
6:W->Y(假定电机方向为正转)
那么电流会按照下面的顺序流过电机线圈:
1:U相到V相(U->V)
2:U相到W相(U->W)
3:V相到W相(V->W)
4:V相到U相(V->U)
5:W相到U相(W->U)
6:W相到V相(W->V)
共6步,如此循环。(如图1所示)

图1
同理,若电机方向为反转,则开关顺序为:
1:U->Z
2:U->Y
3:W->Y
4:W->X
5:V->X
6:V->Z
这就是无刷电机BLDC的梯形波/方波控制算法。
2、三相BLDC控制时序
无刷电机的控制时序依赖于电机转子位置,为方便说明超前角/导通角,这里以带霍尔传感器的电机为例。按照霍尔芯片的位置判断,反馈应为中断。每检测到一个有效的霍尔位置信号编码(Pattern),就开始换相到下一步,然后接着开始检测下一次的位置反馈中断。如下图2。按照上述6步不断换相的顺序:
1:U->V
2:U->W
3:V->W
4:V->U
5:W->U
6:W->V
再循环往复。
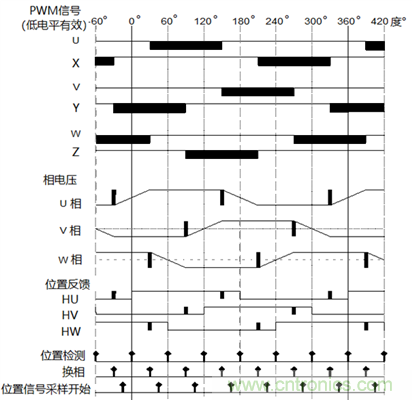
图2
在每次检测到霍尔位置Pattern时,换相并输出对应的脉宽调制(PWM - Pulse Width Modulation)Pattern。之后,对位置反馈信号开始采样监控,直到再次检测到有效的霍尔位置Pattern。
图中PWM开关信号(U~Z)中的黑色区块为有效电平,内含PWM载波(从几K到几十KHz,Duty可变)。图中的相电压(U相~W相)中的黑色窄柱状波形是在此换相时刻(从此一步切换到下一步PWM Pattern),由于续流等原因(电机线圈的电感)造成的换相电压跳变。
3、超前角
在无刷直流电机(BLDC - BrushLess DC)控制里经常会用到Lead Angle,即超前角/导通角。因为电机线圈是感性负载,所以相对于线圈上的加载电压,线圈里的电流会有一定的时延,从而影响电机的效率和产生噪音。以电机U相电压举例,把上图PWM信号U、X和U相电压波形放大,如下图。其中U相展开可看到实际电压波形,内含PWM载波。忽略PWM载波看包络图,如下图3最下面波形所示。
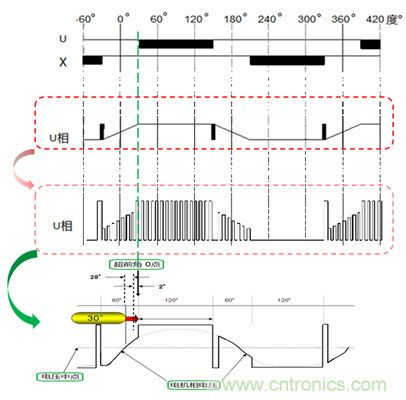
图3:U相展开时实际的电压波形
这里,绿色虚线处是换相点,定义为超前角/导通角0度点。该点位于相电压中点右边(后边)30度。而Lead Angle超前角/导通角,顾名思义就是从超前角0度往左(往前)提前多少度。
一般来说,特别是无刷电机BLDC梯形波控制算法,在电机高转速情况下,需要在每个换相点前对6个PWM输入信号(U~Z)插入一定的Lead Angle超前角/导通角,图4是不同超前角/导通角,从0度、7.5度、15度到30度,所分别对应的输入信号。

图4
超前角/导通角的调试取决于电机本身参数、电机电压以及电机转速等。一般从经验来说,对于相同电机,在给定的电压下,电机的转速越高,那么就需要更高的超前角/导通角。调试合适的Lead Angle的关键方法就是在电机带负载情况下,在感兴趣的工作转速(或范围)下找出电机效率最高(输出功率/输入功率)、电机噪音和震动最小的情况。
对于带霍尔传感器的电机来说,调整霍尔传感器的物理位置(对应到电子角度)也能起到类似效果。而一般来说,霍尔传感器位于电机内的PCB板上,不太容易调整。反过来说,通过调整Lead Angle超前角/导通角,只要对应好物理角度和电子角度(取决于电机转子的极对数)关系,也能起到类似修正电机内部霍尔传感器物理位置的作用,从而通过简单易行的软件方式(超前角/导通角的调整)实现等同于以不方便或复杂的方式调整传感器物理位置的效果。
推荐阅读:
使用PCB孔来减少EMI,接地连接非常重要
反激式开关电源变压器可以这样设计
电容器的发热特性
殊途同归,从两个角度解释电容退耦原理
温度测量:如何消除线阻抗引入的误差?
