由于感测技术不断进步,现在机器手臂能胜任的工作已越来越多元化
品慧电子讯除了最基本的取放(Pick&Place)应用外,由于感测技术不断进步,现在机器手臂能胜任的工作已越来越多元化。 许多过去只能靠人工操作的组装流程,例如软板(PFC)、缆线的插件作业,现在也能靠机器手臂代劳;有些连人力都不见得能做得好的微米级精密组装,只要搭配正确的感测技术,机器手臂也能大展身手。
力觉感测技术就是让机器手臂也能胜任软板/缆线插件、微米级精密组装等「细活」的关键。 藉由力觉感测,手臂能感知其所接触的对象反馈给机器手臂的力量,同时也让手臂得以精准地控制其对工件所施加的力道。 这不仅让手臂得以胜任各种需要纤细力道控制的工作,对容易破碎的物体进行作业,也让手臂能够精准地把工件插入孔位。
力觉感测结合手臂的特殊考虑因素
对机器手臂而言,除了机器视觉之外,力觉也是一个很常见的配套感测技术。 但相较于视觉,力觉感测属于接触式感测,因此力觉感测的设计开发要顾虑到许多机械结构的因素。
虽然力觉感测的技术流派众多,但大致上都可用弹簧跟阻尼的概念来理解,因此,当手臂上的力觉传感器受到一股外力作用时,传感器会有程度不一的变形。
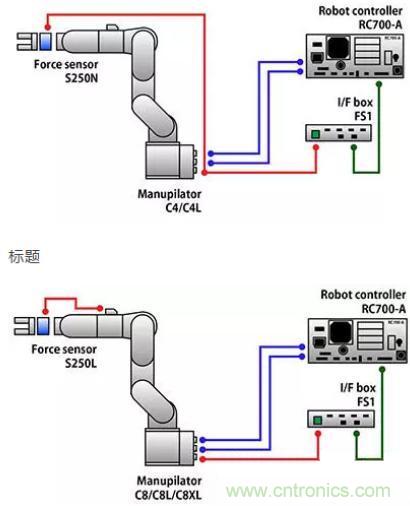
除了传感器本身的变形外,另一个会影响到传感器运作的机械性因素是传感器跟控制器的配线。 目前市面上绝大多数的机器手臂若要搭载力觉传感器,都是用外挂的方式加装在手臂上,传感器与控制器之间的连接线缆则裸露在手臂本体外。 因此,若配线时没有保留适当的裕度,手臂伸缩运作会拉扯到配线,使力觉传感器受力,从而影响力觉传感器的读数。
图1跟图2是两种力觉传感器整合在机器手臂上的配线方式,图1是完全外露的配线方式,图2则是让线路在机械手臂内部走线。 在由图2可看出,在设计时就考虑到整合力觉传感器需求的机种,像是爱普生(Epson)的C8系列机器手臂,在配在线会相对轻松许多,因为裸露在外的线路很短,不太需要担心手臂运动会拉扯到线路,影响力觉感测。
除了机械性因素外,传感器本身的噪讯水平,也是影响传感器精准度的一个重要因素。 为了获得更好的分辨率,传感器本身的噪讯水平必须非常低,否则讯号会被噪声盖过。
简化开发/降低成本 统一软硬件平台有大用
不可讳言的是,力觉感测是一种成本较高,应用上也有比较多因素需要考虑的技术,因此,目前力觉感测在产在线的运用还没到十分普及的地步。 如何降低门坎,遂成为手臂/力觉方案供货商必须面对的课题。
就如同机器视觉跟机器手臂采用统一平台,可以带来很显著的效益。 力觉跟手臂供货商如果能预先考虑到整合应用的需求,在产品设计时就提出完整的对策,也可帮用户跟系统整合者省下许多麻烦。 前面提到,在手臂本体上预留力觉传感器的连接接口,就是一个很显著的例子。
不过,如果是只提供机器手臂或力觉感测方案的业者,要在产品设计时间就有这么周延的考虑,其实有实务上的困难,而这也是由单一供货商包办整套方案的优势所在。
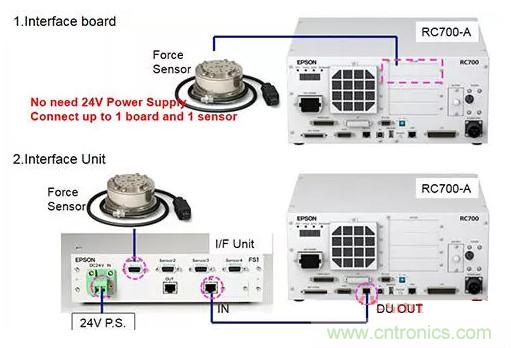
以爱普生为例,在硬件面,除了手臂上预留连接接口之外,如果能直接在手臂控制器上内建力觉传感器接口,就有机会帮用户省下额外采购力觉感测处理器的成本。 如果是在比较单纯的应用情境,例如一支手臂搭配一颗力觉传感器的状况下,爱普生的手臂控制器(CU Controller)可以透过安装适配卡的方式,直接与力觉传感器建立联机。 但如果应用需要用到多颗力觉传感器,则可以采用额外的一对多处理器,再与手臂控制器连接(图3)。
在软件整合层面,如果手臂跟力觉传感器来自两家不同的供货商,系统整合者(SI)或制造业者内部的自动化工程团队,也很难期望能用同一套开发工具为手臂跟力觉编写控制程序,数据抛转也会是个蛮麻烦的问题。 但如果手臂跟力觉来自同一家供货商,不仅开发工具统一,甚至连程序撰写都会变得相当轻松。
事实上,对爱普生手臂跟力觉的软件整合者而言,手臂跟力觉的整合是非常直觉的。 用户甚至只须在既有的手臂控制程序后面加上一段力觉描述,就能完成软件整合。 用户也可以把力觉感测宣告为某种手臂动作的触发条件,当力觉传感器感应到对应的力量讯号,就能指挥手臂进行对应的动作。
此外,为了简化手臂控制程序的编写,有些机器手臂业者开始推广手动教导式编程的概念,也就是用人手拉着机器手臂,让机器手臂自行纪录其运动轨迹,以取代传统的程序编写。 这种做法在协作型机器手臂上很流行,但工业手臂搭配力觉传感器,其实也可以实现类似的功能。 在手动教导模式下,手臂运动是外力(人手拉动)所造成的,故手臂上只要有力觉传感器,能一五一十地记录下手臂本体所受到的外力大小、方向,也能做到类似的功能。
力觉感测拓展机器手臂应用范畴
对电子产品的组装作业来说,使用整合了高分辨率力觉传感器的机器手臂,最大的优势在于可以执行十分高精密度的插件组装作业。 此外,在高分辨率力觉感测的辅助之下,有些至今仍必须采用人工插件的作业程序,也可以改由机器手臂执行。
在高精度插件应用方面,由于许多电子终端产品都越来越小巧,因此其连接器跟板卡之间的空隙或公差,也跟着缩小到数十微米等级。 在这种情况下,即便用人力来插件,也未必能有很高的作业效率,因为板卡跟连接器之间的缝隙太小了,如果插入的方向稍微有点角度偏差,就会无法插入。
但整合了高精度力觉传感器的机器手臂,在夹持工件插入连接器的过程中,会不断感测到接触面施予工件的反作用力,并藉此不断调整其插入的角度,正确地完成插件作业。 如果在连接器母座上有导角设计,还可以发挥引导手臂寻找孔穴的效果,加快组装作业的速度。 根据爱普生的测试,整合高分辨率力觉传感器的手臂,即便公头跟母座间的公差或缝隙只有1条(10微米),也可以顺利执行插件作业。
另一个插件应用的案例则是传统电容的插件作业。 虽然现在大多数电子产品已经不再采用带有两条插脚的传统电容,改用芯片电容,但由于芯片电容的容值较小,因此某些应用还是得采用传统封装的大型电容。
就产品组装来说,要在电路板上正确插入这种电容,最大的挑战在于电容的接脚既长又软,很容易受力变形、歪曲,因此在组装时,往往还是得用人工插件来安装这类电容。 然而,在高精度力觉感测的辅助下,机器手臂可以先把电容的正极(长脚)插入电路板上的孔穴,然后再用力觉感测帮负极(短脚)寻找到正确的孔穴,完成插件作业。 只要长短脚之间的开岔变形在容许范围内,手臂就能完成自动组装。
软性电路板(FPC)、扁平电缆的组装,目前也大多仍由人工进行,因为软板、扁平电缆的插件作业对力道控制有相当的要求,而且插完后有时还要稍微回拉,以确定连接器跟扁平电缆/软板已牢固接合。 若要用机器手臂执行这种需要精准力道控制的作业,力觉感测技术可说是基本配备。
除了这些精密组装之外,力觉感测还有其他的应用潜力,例如运用在轴承跟转轴的组装,或是工件的抛光处理上。
轴承跟转轴的组装有时需要用恒定的力量持续推动转轴,使其穿过轴承,这时力觉感测就能派上用场。 在抛光作业方面,现在普遍的作法是让手臂夹持着工件,按照固定的路线跟角度,让工件与砂轮机产生接触。 但这种做法无法确定工件跟砂轮机接触的力道,当砂轮随着时间出现磨耗,工件的抛光效果会慢慢变得不如预期。 若是有力觉感测技术辅助,则工件跟砂轮接触的力量便可一直保持在恒定状态。
慢工出细活 手臂动作速度将受限制
对制造业者来说,机器手臂的动作速度越快,则生产线的产能越大,因此制造业者在使用机器手臂时,往往会希望手臂无时无刻保持全速运转状态。 然而,如果要用机器手臂做精密组装,则手臂运作的速度会受到一定限制,因为「慢工出细活」这句话在机器手臂上面也同样适用。
对力觉传感器来说,手臂运动所产生的加速度,其实是一种干扰讯号。 因此,若想用搭载力觉的手臂来做精密组装,手臂的加速度不能超过精密组装所需的力觉分辨率门坎限制。 这也意味着手臂在做精密组装时,动作必然要放慢。 因此,制造业者若有精密组装的需求,在此作业阶段可视产能需求,多设几个平行工作站来避免精密组装成为产线的瓶颈。
另外,将自动化生产纳入考虑的设计观念(Design for Automation, DfA),在未来也会越来越受到重视。 一点小小的设计变更,就能让机器手臂作业变得更顺畅。 DfA是一个跨部门,跨产业的议题,需要各方通力合作,才能找到理想的解决方法。
推荐阅读:
传感器融合将更进一步成为常态
变频器过流的原因和保护措施有哪些呢?
影响锂离子电池低温性能的因素有哪些?
动力电池和储能电池各有什么优缺点
室内空气盒子产品中传感器应用
