五分钟教你如何组合使用3D加速计和陀螺仪
品慧电子讯滤波是信号处理里面比较重要的一个环节,通常减少直流当中的交流成分并获得比较平滑的直流电,在整流之后都要经过滤波电路,滤波常用的元器件是电容、电阻以及电感,这三个均属于无源器件,下面介绍无源滤波电路常用的五种电路形式。
加速计和陀螺仪是获取无人机、蜂窝电话、汽车、接收机和移动物联网设备中加速和旋转信息的传感器选择。但加速计和陀螺仪都容易有误差,加速计可能出现噪音、陀螺仪可能出现漂移,因此要求设计师采用新颖的方法实现最高的精度。
陀螺仪是高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于垂直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。
当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
接下来将介绍这两种传感器的示例,并说明如何利用传感器融合技术,将这两种传感器的结果结合在一起并减少这些误差的影响。
选择正确的传感器
加速计用于测量对物体施加的所有线性力,单位是毫伏/克 (mV/g)。移动的物体会展现出动态运动,例如加速度,并持续受到重力这一静态力。
将加速计连接到物体上后,可以测量物体的加速度和作用于物体上的万有引力。但随着时间的推移,加速计容易出现位置误差。

陀螺仪可提供物体角速度随时间的变化率,单位是 mV/度/秒 (mV/deg/sec)。将陀螺仪连接到物体上后,传感器可以平稳测量物体的角度变化,但同加速计一样,随着时间的推移,陀螺仪也会出现稳定增大的角度误差。
作为加速计的 MEMS
单个 MEMS 加速计的结构采用固定硅板以及用于响应外力的机械弹簧(图 2)。
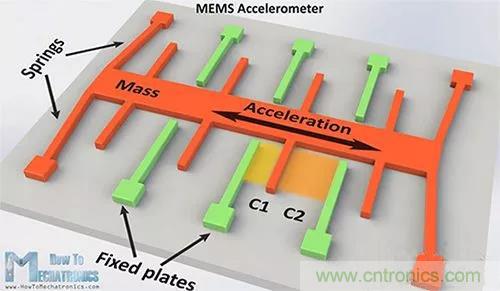
通用 MEMS 感应技术是使用片载可变电容器。在运动中,绿色的固定板保持静止,而橙色的重物沿加速度轴弯曲。通过这种运动,电容值 C1 和 C2 会随着固定板与重物之间距离的变化而变化。
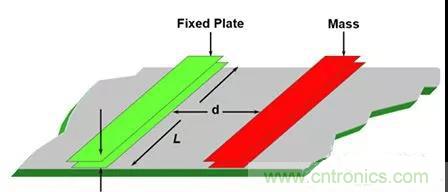
在数量上,C1 和 C2 值的变化取决于电容器板之间的距离 d。

推荐阅读:
浅谈无源滤波电路常用的五种电路形式
Manz 亚智科技首台国产化G10.5面板湿制程设备成功研发并交付出货
AI芯片大热,中国芯瑞芯微商用化弯道超车
新晔电子汽车照明与红外上海专场成功举办!
新晔集团携手欧司朗开启LED舞台照明新视界
