热继电器工作原理及结构图解
热继电器作用:
热继电器主要用来对异步电动机进行过载保护,他的工作原理是过载电流通过热元件后,使双金属片加热弯曲去推动动作机构来带动触点动作,从而将电动机控制电路断开实现电动机断电停车,起到过载保护的作用。鉴于双金属片受热弯曲过程中,热量的传递需要较长的时间,因此,热继电器不能用作短路保护,而只能用作过载保护热继电器的过载保护。

热继电器的构造:
热继电器的结构如图2所示

图中:1——电流调节凸轮,2——片簧(2a,2b),3——手动复位按钮,4——弓簧片,5——主金属片,6——外导板,7——内导板,8——常闭静触点,9——动触点,10——杠杆,11——常开静触点(复位调节螺钉),12——补偿双金属片,13——推杆,14——连杆,15——压簧
使用热继电器对电动机进行过载保护时,将热元件与电动机的定子绕组串联,将热继电器的常闭触头串联在交流接触器的电磁线圈的控制电路中,并调节整定电流调节旋钮,使人字形拨杆与推杆相距一适当距离。当电动机正常工作时,通过热元件的电流即为电动机的额定电流,热元件发热,双金属片受热后弯曲,使推杆刚好与人字形拨杆接触,而又不能推动人字形拨杆。常闭触头处于闭合状态,交流接触器保持吸合,电动机正常运行。
若电动机出现过载情况,绕组中电流增大,通过热继电器元件中的电流增大使双金属片温度升得更高,弯曲程度加大,推动人字形拨杆,人字形拨杆推动常闭触头,使触头断开而断开交流接触器线圈电路,使接触器释放、切断电动机的电源,电动机停车而得到保护。
热继电器其它部分的作用如下:人字形拨杆的左臂也用双金属片制成,当环境温度发生变化时,主电路中的双金属片会产生一定的变形弯曲,这时人字形拨杆的左臂也会发生同方向的变形弯曲,从而使人字形拨杆与推杆之间的距离基本保持不变,保证热继电器动作的准确性。这种作用称温度补偿作用。
螺钉8是常闭触头复位方式调节螺钉。当螺钉位置靠左时,电动机过载后,常闭触头断开,电动机停车后,热继电器双金属片冷却复位。常闭触头的动触头在弹簧的作用下会自动复位。此时热继电器为自动复位状态。将螺钉逆时针旋转向右调到一定位置时,若这时电动机过载,热继电器的常闭触头断开。其动触头将摆到右侧一新的平衡位置。电动机断电停车后,动触头不能复位。必须按动复位按钮后动触头方能复位。此时热继电器为手动复位状态。若电动机过载是故障性的,为了避免再次轻易地起动电动机,热继电器宜采用手动复位方式。若要将热继电器由手动复位方式调至自动复位方式,只需将复位调节螺钉顺时针旋进至适当位置即可。
有些型号的热继电器还具有断相保护功能。其结构示意图如图3所示:
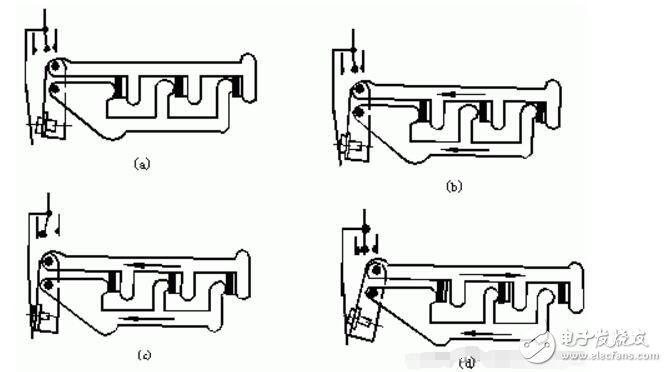
图3 差动式断相保护装置示意图
(a)通电前,(b)三相通有额定电流,(c)三相均衡过载,(d)一相断电故障
热继电器的断相保护功能是由内、外推杆组成的差动放大机构提供的。当电动机正常工作时,通过热继电器热元件的电流正常,内外两推杆均向前移至适当位置。当出现电源一相断线而造成缺相时,该相电流为零,该相的双金属片冷却复位,使内推杆向右移动,另两相的双金属片因电流增大而弯曲程度增大,使外推杆更向左移动,由于差动放大作用,在出现断相故障后很短的时间内就推动常闭触头使其断开,使交流接触器释放,电动机断电停车而得到保护。
热继电器的工作原理
当电动机正常运行时,热继电器的热元件不会产生足够的热量使保护功能动作,其常闭触头保持闭合状态;当电动机过载时,热继电器的热元件会产生足够的热量使保护功能动作,其常闭触头断开,通过控制电路使电动机失电,从而保护电动机。当故障排除后,应使热继电器复位,才可以重新启动电动机。热继电器一般都具有手动复位和自动复位两种复位形式。这两种复位形式的转换,可借助复位螺钉的调节来完成,热继电器出厂时,生产厂家一般设定成自动复位状态。在使用时,热继电器设定成手动复位状态还是自动复位状态应根据控制回路的具体情况而定。一般情况下,应遵循热继电器保护动作后即使热继电器自动复位,被保护的电动机都不应自动再启动的原则,否则应将热继电器整定为手动复位状态。这是为了防止电动机在故障未被消除而多次重复再启动损坏设备。例如:一般采用按钮控制的手动启动和手动停止的控制电路,热继电器可设定成自动复位形式;采用自动元件控制的自动启动电路应将热继电器设定为手动复位形式。
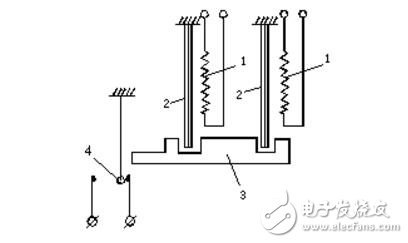
热继电器的工作原理图
1——热元件,2——双金属片,3——导板,4——触点
热继电器的选用
(1)长期稳定工作的电动机 可按电动机的额定电流选用热继电 器。取热继电器整定电流的0.95~1.05 倍或中间值等于电动机额定电流。使用 时要将热继电器的整定电流调至电动机的额定电流值。
(2)应考虑电动机的绝缘等级及结构由于电动机绝缘等级不同,其的容许温升和承受过载的能力也不同。同样条件下,绝缘等级越高,过载能力就越 强。即使所用绝缘材料相同,但电动机 结构不同,在选用热继电器时也应有所 差异。例如,封闭式电动机散热比开启 式电动机差,其过载能力比开启式电动 机低,热继电器的整定电流应选为电动 机额定电流的60%~80%。
(3)应考虑电动机的启动电流和启动时间电动机的启动电流一般为额定电流 的5~7倍。对于不频繁启动、连续运 行的电动机,在启动时间不超过6s的情况下,可按电动机的额定电流选用热继电器。
(4)若用热继电器作电动机缺相保护,应考虑电动机的接法对于Y形接法的电动机,当某相断线时,其余未断相绕组的电流与流过热继电器电流的增加比例相同。一般的三相式热继电器,只要整定电流调节合理,是可以对Y形接法的电动机实现断 相保护的。对于Δ形接法的电动机,其相断线时,流过未断相绕组的电流与流过热继电器的电流增加比例则不同。也就是说,流过热继电器的电流不能反映 断相后绕组的过载电流,因此,一般的热继电器,即使是三相式,也不能为Δ形接法的三相异步电动机的断相运行提供充分保护。此时,应选用JR20型或T系列这类带有差动断相保护机构的热继电器。
(5)应考虑具体工作情况若要求电动机不允许随便停机,以免遭受经济损失,只有发生过载事故时,方可考虑让热继电器脱扣。此时,选取热继电器的整定电流应比电动机额定电流偏大一些。
