动画演示陀螺仪的工作原理,一分钟弄懂
品慧电子讯陀螺仪是用来测量角速率的器件,在加速度功能基础上,可以进一步发展,构建陀螺仪。最近听大牛的传感器同事的陀螺仪专业讲座,深入浅出的讲解让小编对陀螺仪的原理与应用有种顿悟赶脚,抽空整理部分内容,给对这个技术不太明了的小伙伴们科普下哦~

陀螺仪的内部原理是这样的:对固定指施加电压,并交替改变电压,让一个质量块做振荡式来回运动,当旋转时,会产生科里奥利加速度,此时就可以对其进行测量;这有点类似于加速度计,解码方法大致相同,都会用到放大器。
- 角速率由科氏加速度测量结果决定
- 科氏加速度 = 2 × (w × 质量块速度)
- w是施加的角速率(w = 2 πf)
- 通过14 kHz共振结构施加的速度(周期性运动)快速耦合到加速度计框架
- 科氏加速度与谐振器具有相同的频率和相位,因此可以抵消低速外部振动
- 该机械系统的结构与加速度计相似(微加工多晶硅)
- 信号调理(电压转换偏移)采用与加速度计类似的技术
施加变化的电压来回移动器件,此时器件只有水平运动没有垂直运动。如果施加旋转,可以看到器件会上下移动,外部指将感知该运动,从而就能拾取到与旋转相关的信号。

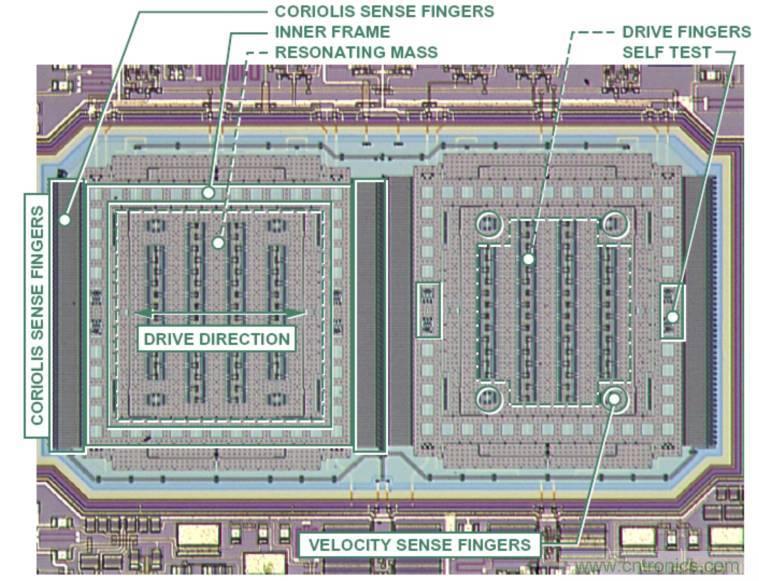
上面的动画,只是抽象展示了陀螺仪的工作原理,而真实的陀螺仪内部构造是下面这个样子,别不小心误会了哦~
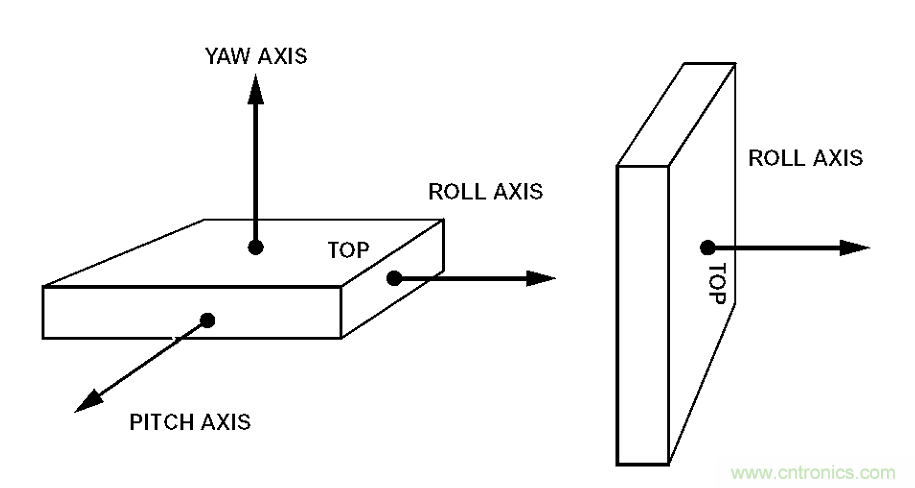
PS:陀螺仪可以三个一起设计,分别对应于所谓滚动、俯仰和偏航。任何了解航空器的人都知道,俯仰是指航空器的上下方向,偏航是指左右方向,滚动是指向左或向右翻滚。要正确控制任何类型的航空器或导弹,都需要知道这三个参数,这就会用到陀螺仪。它们还常常用于汽车导航,当汽车进入隧道而失去GPS信号时,这些器件会记录您的行踪。
