工业机器人的基本组成及技术参数
品慧电子讯:工业机器人由3大部分6个子系统组成。3大部分是机械部分、传感部分和控制部分。6个子系统是驱动系统、机械结构系统、感受系统、机器人-环境交互系统、人机交互系统和控制系统, 可用图1.13来表示。
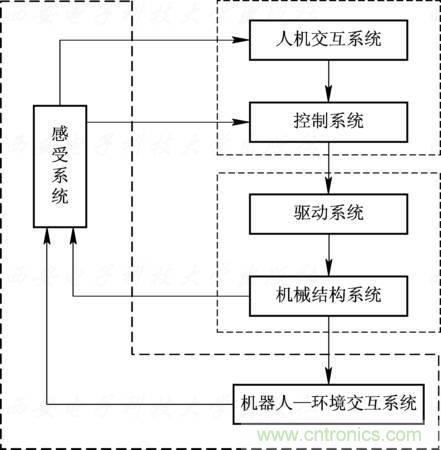
图1.13 机器人系统组成
6个子系统的作用分述如下:
1. 驱动系统
要使机器人运行起来, 需给各个关节即每个运动自由度安置传动装置, 这就是驱动系统。驱动系统可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以是直接驱动或者是通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
2. 机械结构系统
工业机器人的机械结构系统由基座、手臂、末端操作器三大件组成, 如图1.14所示。每一大件都有若干自由度, 构成一个多自由度的机械系统。若基座具备行走机构, 则构成行走机器人; 若基座不具备行走及腰转机构, 则构成单机器人臂(SingleRobotArm)。手臂一般由上臂、下臂和手腕组成。末端操作器是直接装在手腕上的一个重要部件, 它可以是二手指或多手指的手爪, 也可以是喷漆枪、焊具等作业工具。
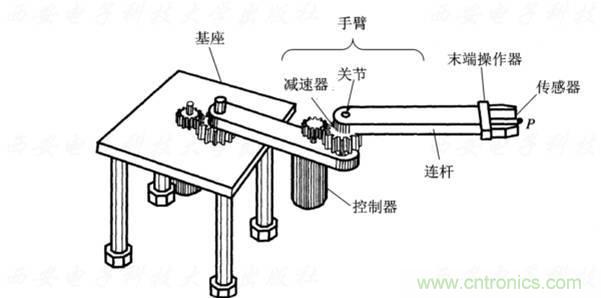
图1.14 工业机器人的机械结构系统
3. 感受系统
感受系统由内部传感器模块和外部传感器模块组成, 用以获取内部和外部环境状态中有意义的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。人类的感受系统对感知外部世界信息是极其灵巧的, 然而,对于一些特殊的信息, 传感器比人类的感受系统更有效。
4. 机器人-环境交互系统
机器人-环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的系统。工业机器人与外部设备集成为一个功能单元, 如加工制造单元、焊接单元、装配单元等。当然, 也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。
5. 人机交互系统
人机交互系统是使操作人员参与机器人控制并与机器人进行联系的装置,例如, 计算机的标准终端, 指令控制台, 信息显示板, 危险信号报警器等。该系统归纳起来分为两大类: 指令给定装置和信息显示装置。
6. 控制系统
控制系统的任务是根据机器人的作业指令程序以及从传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。假如工业机器人不具备信息反馈特征, 则为开环控制系统;若具备信息反馈特征, 则为闭环控制系统。根据控制原理,控制系统可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式,控制系统可分为点位控制和轨迹控制。
图1.15为三菱装配机器人系统的基本构成。该机器人由机器人主体、控制器、示教盒和PC机构成。可用示教的方式和用PC机编程的方式来控制机器人的动作。
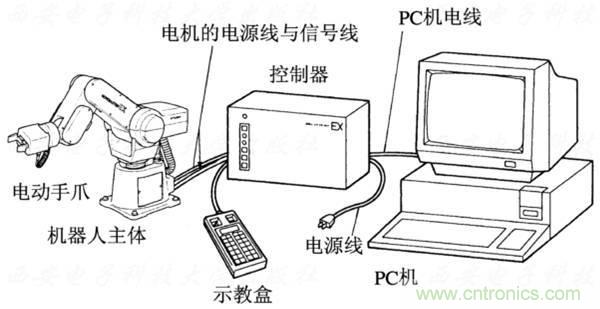
图1.15 三菱装配机器人系统
工业机器人的技术参数
工业机器人的技术参数是各工业机器人制造商在产品供货时所提供的技术数据。表1.2和表1.3为两种工业机器人的主要技术参数。尽管各厂商提供的技术参数不完全一样, 工业机器人的结构、用途等有所不同, 且用户的要求也不同, 但工业机器人的主要技术参数一般应有自由度、重复定位精度、工作范围、最大工作速度和承载能力等。
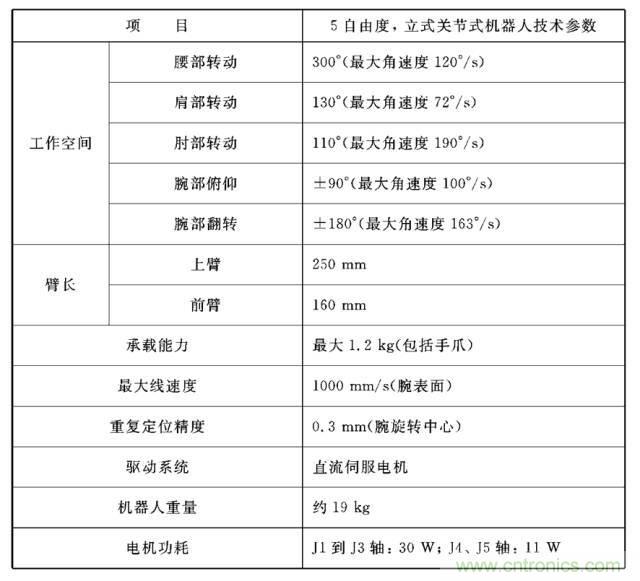
表1.2 三菱装配机器人Movemaster EX RV-M1的主要技术参数
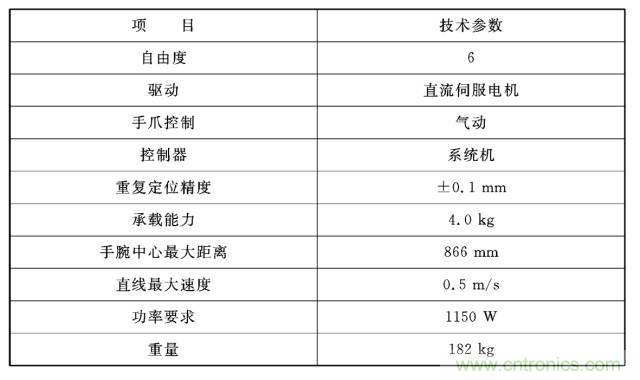
表1.3 PUMA 562机器人的主要技术参数
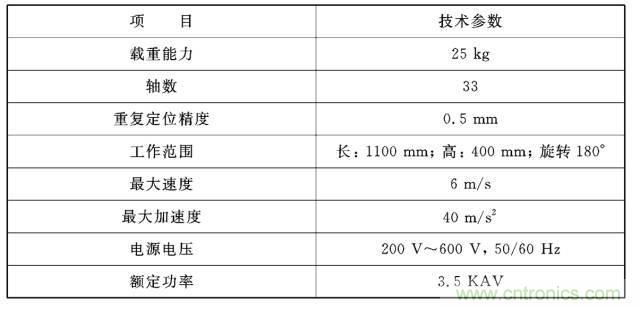
表1.4 BR-210 并联机器人的主要技术参数
1. 自由度(Degrees of Freedom)
自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度。在三维空间中描述一个物体的位置和姿态(简称位姿)需要六个自由度。但是, 工业机器人的自由度是根据其用途而设计的, 可能小于六个自由度, 也可能大于六个自由度。例如, A4020装配机器人具有四个自由度, 可以在印刷电路板上接插电子器件; PUMA 562机器人具有六个自由度, 如图1.16所示,可以进行复杂空间曲面的弧焊作业。从运动学的观点看, 在完成某一特定作业时具有多余自由度的机器人, 就叫做冗余自由度机器人。例如, PUMA 562机器人去执行印刷电路板上接插电子器件的作业时就成为冗余自由度机器人。利用冗余自由度可以增加机器人的灵活性、躲避障碍物和改善动力性能。人的手臂(大臂、小臂、手腕)共有七个自由度, 所以工作起来很灵巧,手部可回避障碍而从不同方向到达同一个目的点。
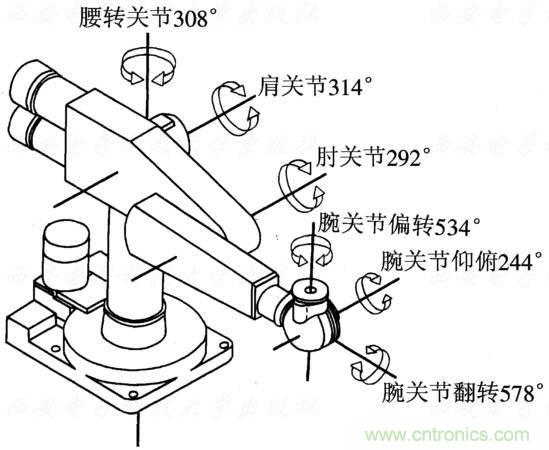
图1.16 PUMA 562工业机器人
2. 定位精度(Positioning Accuracy)
工业机器人精度是指定位精度和重复定位精度。定位精度是指机器人手部实际到达位置与目标位置之间的差异。重复定位精度是指机器人重复定位其手部于同一目标位置的能力, 可以用标准偏差这个统计量来表示, 它是衡量一列误差值的密集度(即重复度), 如图1.17所示。
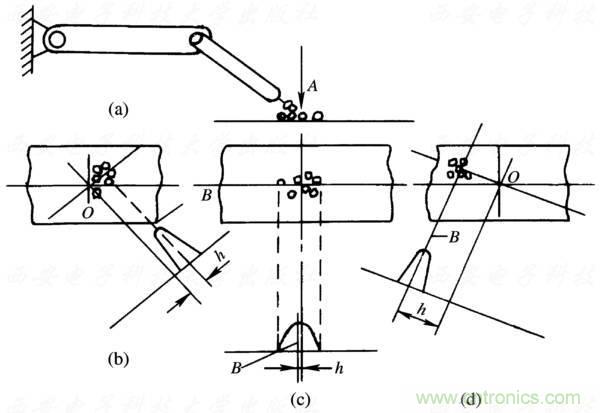
图1.17 工业机器人定位精度和重复定位精度的典型情况
(a) 重复定位精度的测量;(b) 合理定位精度,良好重复定位精度;
(c) 良好定位精度, 很差重复定位精度;(d) 很差定位精度,良好重复定位精度
3. 工作范围(Work Space)
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合, 也叫工作区域。因为末端操作器的尺寸和形状是多种多样的, 为了真实反映机器人的特征参数, 所以, 这里是指不安装末端操作器时的工作区域。工作范围的形状和大小是十分重要的, 机器人在执行作业时可能会因为存在手部不能到达的作业死区(Dead Zone)而不能完成任务。图1.18 和图1.19所示分别为PUMA机器人和A4020机器人的工作范围。
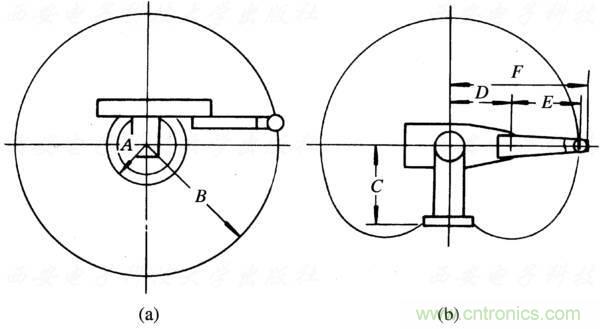
图1.18 PUMA机器人工作范围
(a) 顶视图; (b) 侧视图
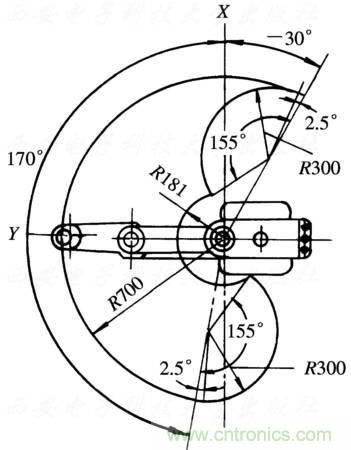
图1.19 A4020型SCARA机器人工作范围
4. 速度(Speed)和加速度
速度和加速度是表明机器人运动特性的主要指标。说明书中通常提供了主要运动自由度的最大稳定速度,但在实际应用中单纯考虑最大稳定速度是不够的。这是因为,由于驱动器输出功率的限制,从启动到达最大稳定速度或从最大稳定速度到停止, 都需要一定时间。如果最大稳定速度高, 允许的极限加速度小, 则加减速的时间就会长一些,对应用而言的有效速度就要低一些; 反之, 如果最大稳定速度低,允许的极限加速度大, 则加减速的时间就会短一些, 这有利于有效速度的提高。但如果加速或减速过快, 有可能引起定位时超调或振荡加剧, 使得到达目标位置后需要等待振荡衰减的时间增加, 则也可能使有效速度反而降低。所以, 考虑机器人运动特性时, 除注意最大稳定速度外, 还应注意其最大允许的加减速度。
5. 承载能力(Payload)
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。承载能力不仅决定于负载的质量, 而且还与机器人运行的速度和加速度的大小和方向有关。为了安全起见, 承载能力这一技术指标是指高速运行时的承载能力。通常, 承载能力不仅指负载, 而且还包括了机器人末端操作器的质量。
机器人有效负载的大小除受到驱动器功率的限制外, 还受到杆件材料极限应力的限制, 因而它又和环境条件(如地心引力)、运动参数(如运动速度、加速度以及它们的方向)有关。如加拿大手臂,它的额定可搬运质量为15 000 kg, 在运动速度较低时能达到30 000 kg。然而,这种负荷能力只是在太空中失重条件下才有可能达到,在地球上, 该手臂本身的重量达450 kg, 它连自重引起的臂杆变形都无法承受, 更谈不上搬运质量了。
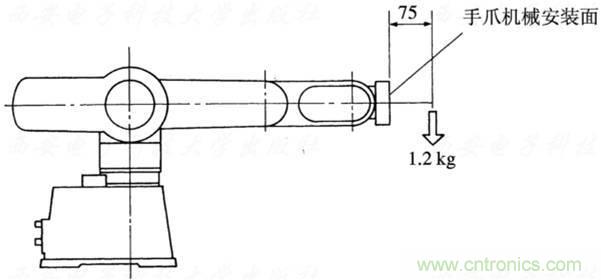
图1.20三菱装配机器人不带电动手爪时的承载能力
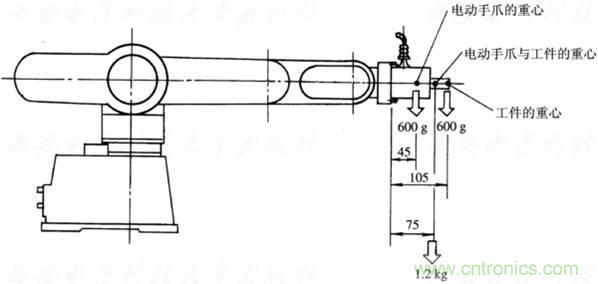
图1.21三菱装配机器人带电动手爪时的承载能力
1.3.3 工业机器人的坐标
如图1.22所示, 工业机器人的坐标形式有直角坐标型、圆柱坐标型、球坐标型、关节坐标型和平面关节型。

图1.22 工业机器人的几种坐标形式
1. 直角坐标/笛卡儿坐标/台架型(3P)
这种机器人由3个线性关节组成, 这3个关节用来确定末端操作器的位置, 通常还带有附加的旋转关节,用来确定末端操作器的姿态。这种机器人在x、y、z轴上的运动是独立的, 运动方程可独立处理, 且方程是线性的, 因此很容易通过计算机控制实现; 它可以两端支撑, 对于给定的结构长度,刚性最大; 它的精度和位置分辨率不随工作场合而变化, 容易达到高精度。但是, 它的操作范围小,手臂收缩的同时又向相反的方向伸出, 既妨碍工作, 又占地面积大, 运动速度低, 密封性不好。
图1.23虚线所示为直角坐标机器人的工作空间示意图,它是一个立方体形状。
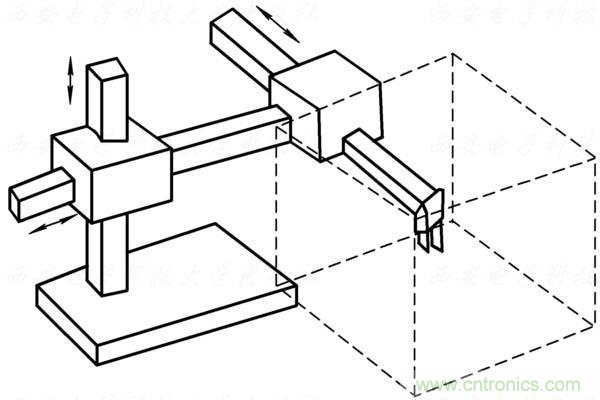
图1.23 直角坐标机器人的工作空间示意图
2. 圆柱坐标型(R2P)
圆柱坐标机器人由两个滑动关节和一个旋转关节来确定部件的位置, 再附加一个旋转关节来确定部件的姿态。这种机器人可以绕中心轴旋转一个角,工作范围可以扩大,且计算简单; 直线部分可采用液压驱动,可输出较大的动力; 能够伸入型腔式机器内部。但是,它的手臂可以到达的空间受到限制, 不能到达近立柱或近地面的空间; 直线驱动部分难以密封、防尘; 后臂工作时, 手臂后端会碰到工作范围内的其它物体。圆柱坐标机器人的工作范围呈圆柱形状, 如图1.24所示。
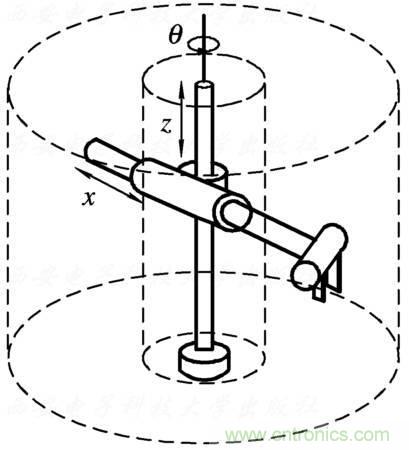
图1.24 圆柱坐标机器人的工作范围
3. 球坐标型(2RP)
球坐标机器人采用球坐标系, 它用一个滑动关节和两个旋转关节来确定部件的位置, 再用一个附加的旋转关节确定部件的姿态。这种机器人可以绕中心轴旋转, 中心支架附近的工作范围大,两个转动驱动装置容易密封, 覆盖工作空间较大。但该坐标复杂, 难于控制, 且直线驱动装置仍存在密封及工作死区的问题。球坐标机器人的工作范围呈球缺状, 如图1.25所示。
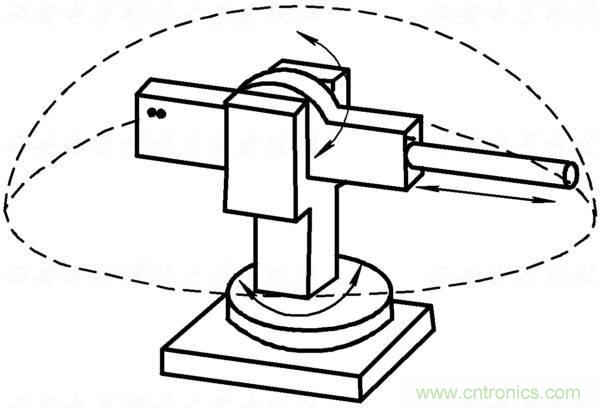
图1.25 球坐标机器人的工作范围
4. 关节坐标型/拟人型(3R)
关节机器人的关节全都是旋转的, 类似于人的手臂, 是工业机器人中最常见的结构。它的工作范围较为复杂, 图1.18所示为PUMA机器人的工作范围。
5. 平面关节型
这种机器人可看做是关节坐标式机器人的特例, 它只有平行的肩关节和肘关节,关节轴线共面。如SCARA(Selective Compliance Assembly Robot Arm)机器人有两个并联的旋转关节, 可以使机器人在水平面上运动, 此外, 再用一个附加的滑动关节做垂直运动。SCARA机器人常用于装配作业, 最显著的特点是它们在x-y平面上的运动具有较大的柔性, 而沿z轴具有很强的刚性, 所以, 它具有选择性的柔性。这种机器人在装配作业中获得了较好的应用。平面关节机器人的工作空间如图1.26所示。
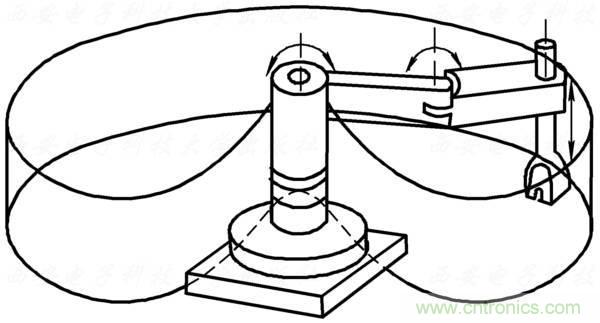
图1.26 平面关节机器人的工作空间
1.3.4 工业机器人的参考坐标系
机器人可以相对于不同的坐标系运动, 在每一种坐标系中的运动都不相同。通常, 机器人的运动在以下三种坐标系中完成(如图1.27所示)。
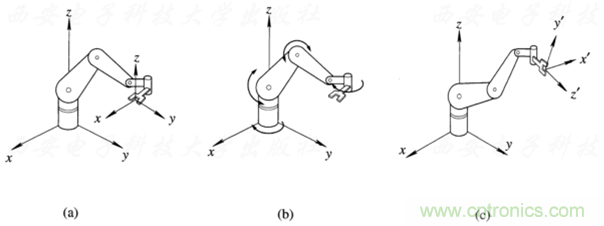
图1.27 机器人的参考坐标系
(a) 全局参考坐标系; (b) 关节参考坐标系; (c) 工具参考坐标系
1. 全局参考坐标系
全局参考坐标系是一种通用坐标系, 由x、y和z轴所定义。在此情况下, 通过机器人各关节的同时运动来产生沿三个主轴方向的运动。在这种坐标系中, 无论手臂在哪里,x轴的正向运动就总是在x轴的正方向。这一坐标系通常用来定义机器人相对于其他物体的运动、与机器人通信的其他部件以及运动路径。
2. 关节参考坐标系
关节参考坐标系用来描述机器人每一个独立关节的运动。假设希望将机器人的手运动到一个特定的位置, 可以每次只运动一个关节, 从而把手引导到期望的位置上。在这种情况下, 每一个关节单独控制, 从而每次只有一个关节运动。由于所用关节的类型(移动、旋转型)不同, 因此,机器人手的动作也各不相同。例如, 如果为旋转关节运动, 则机器人手将绕着关节的轴旋转。
3. 工具参考坐标系
工具参考坐标系描述机器人手相对于固连在手上的坐标系的运动。固连在手上的x′、y′和z′轴定义了手相对于本地坐标系的运动。与通用的全局参考坐标系不同, 本地的工具参考坐标系随机器人一起运动。假设机器人手的指向如图1.27所示, 相对于本地的工具参考坐标系x′轴的正向运动意味着机器人手沿工具参考坐标系x′轴方向运动。如果机器人的手指向别处, 那么同样沿着工具参考坐标系x′轴的运动将完全不同于前面的运动。如果x′轴指向上, 那么沿+x′轴的运动便是向上的; 反之, 如果x′轴指向下,那么沿+x′轴的运动便是向下的。
1.3.5 并联机器人
并联机器人又称并联机构(PM, Parallel Mechanism),一般结构如图1.28所示。并联机器人可以定义为动平台和定平台两种形式, 二者通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
这种机器人有以下几个特点:
(1) 无累积误差,精度较高;
(2) 驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;
(3) 结构紧凑,刚度高,承载能力大;
(4) 完全对称的并联机构具有较好的各向同性;
(5) 工作空间较小。
因为这些特点,并联机器人在需要高刚度、高精度或者大载荷而无需很大工作空间的领域内得到了广泛应用,主要应用于以下几个方面:
(1) 运动模拟器。并联机器人用作运动模拟器如图1.29所示。

图1.28 并联机器人结构

图 1.29 并联机器人
(2) 并联机床。
并联机床具有承载能力强、响应速度快、精度高、机械结构简单、适应性好等优点,是一种“硬件” 简单、“软件”复杂、 技术附加值高的产品。 并联机床如图1.30所示。

图 1.30 并联机床
(3) 微操作机器人。
微操作机器人如图1.31所示, 经常用于安装印刷电路板上的电子元件。

图 1.31 微操作机器人
并联机器人可按并联机构的自由度数分类:
(1) 2 自由度并联机构。 2 自由度并联机构, 如5-R、 3-R、 2-P平面5杆机构是最典型的2自由度并联机构, 这类机构一般具有2 个移动运动。
(2) 3 自由度并联机构。 3 自由度并联机构种类较多, 形式较复杂,一般有以下几个形式: 平面3自由度并联机构, 如3-RPR 机构,它们具有2个转动和1个移动; 球面3自由度并联机构, 如3-RRR 球面机构、 3-UPS-1-S 球面机构,3-RRR 球面机构所有运动副的轴线汇交空间一点,这点称为机构的中心, 而3-UPS-1-S 球面机构则以S的中心点为机构的中心,机构上的所有点的运动都是绕该点的转动运动; 3 维纯移动机构, 如Star Like 并联机构、 Tsai 并联机构和DELTA 机构,该类机构的运动学正反解都很简单, 是一种应用很广泛的3维移动空间机构。空间3自由度并联机构,如典型的3-RPS 机构,这类机构属于欠秩机构, 在工作空间内不同的点的运动形式不同是其最显著的特点, 由于这种特殊的运动特性,阻碍了该类机构在实际中的广泛应用; 还有一类是增加辅助杆件和运动副的空间机构, 如德国汉诺威大学研制的并联机床采用的3-UPS-1-PU 球坐标式3 自由度并联机构, 由于辅助杆件和运动副的制约, 使得该机构的运动平台具有1 个移动和2 个转动的运动(也可以说是3个移动运动)。
(3) 4 自由度并联机构。 4 自由度并联机构大多不是完全并联机构, 如2-UPS-1-RRRR 机构, 运动平台通过3 个支链与定平台相连, 有2个运动链是相同的, 各具有1 个虎克铰U , 1 个移动副P , 其中P 和1 个R 是驱动副, 因此这种机构不是完全并联机构。
(4) 5 自由度并联机构。 现有的5 自由度并联机构结构复杂, 如韩国Lee的5自由度并联机构具有双层结构(2 个并联机构的结合)。
(5) 6 自由度并联机构。 6 自由度并联机构是并联机器人机构中的一大类, 是国内外学者研究得最多的并联机构,广泛应用在飞行模拟器、 6维力与力矩传感器和并联机床等领域。 但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、 动力学模型的建立以及并联机床的精度标定等。 从完全并联的角度出发, 这类机构必须具有6个运动链。但现有的并联机构中, 也有拥有3 个运动链的6 自由度并联机构,如3-PRPS 和3-URS 等机构, 还有在3 个分支的每个分支上附加1个5杆机构作驱动机构的6自由度并联机构等。
1.3.6工业机器人的机构表示方式
为了简化机器人机构的表达过程, 常用特定的图形符号来表示机器人的各种机构运动副, 常用的工业机器人的各种图形符号如表1.5所示。
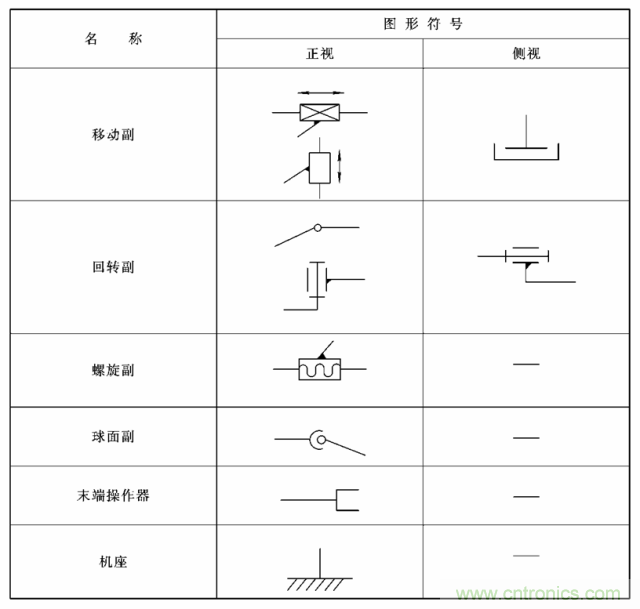
表1.5 工业机器人的各种图形符号
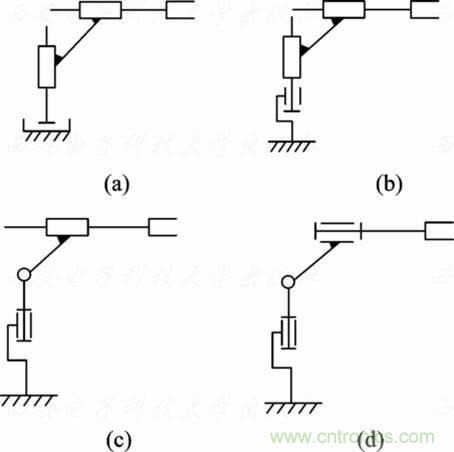
图 1.32 几种常用坐标型机器人机构简图
(a) 直角坐标型; (b) 圆柱坐标型; (c) 球坐标型; (d) 关节坐标型
