一款自动往返小车的设计与实现
品慧电子讯本文详述了一款自动往返小车的设计,该设计采用MSP430F149为核心芯片,选用双全桥驱动芯片作为小车电机驱动,利用PWM技术动态控制电动机的转速,红外线光电传感器检测标识线,U型红外光电传感器测量路程。本次设计集合了智能控制、模式识别、传感技术、电子电气、计算机、机械等多学科的科技创意性设计。
1 总体方案
设计一个能自动往返于起跑线与终点线间的小汽车,从起跑线出发到达终点线后停留10 s,然后自动倒车返回起跑线。在要求的跑道范围内完成加速、减速、限速、刹车、倒车等功能。停车后显示一次往返的时间和路程。
电路设计原理框图如图1所示,可分为MSP430F149、电路驱动模块、黑线检测模块、测速测距模块,显示模块等几部分。
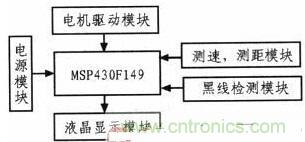 图1 电路设计原理框图
图1 电路设计原理框图采用MSP430F149为核心芯片,选用双全桥驱动芯片L298作为小车电机驱动,利用PWM技术动态控制电动机的转速,红外线光电传感器(LTH1550)检测标识线,U型红外光电传感器测量路程,在液晶显示器上显示行驶时间、行驶路程等相关数据。微处理器主要处理光电传感器传回的地面检测标志信号和U型传感器传回的检测路程信息,向电机驱动器发出指令,控制小车的加速、减速、限速、刹车、倒车等状态,在液晶显示器上显示行驶时间、行驶路程等相关数据。
2 各单元模块设计
2.1 微处理器模块
微处理器的主要任务是判断和处理各种传感器传回的信息,向电机驱动器发出指令,控制小车在往返过程中实现自动加速、限速、减速、刹车、倒车,因为小车实现功能较少,微处理器选用美国TI公司MSP430系列单片机。由于MSP430单片机具有低功耗、高速实时控制以及数据计算,并且拥有更多的片上资源供设计使用,使得设计更加简练更加有效。
2.2 电机驱动模块
采用直流减速电机。直流减速电机转动力矩大,体积小,重量轻,装配简单;过载能力强,能承受频繁的冲击负载,可实现频繁的快速启动和反转;能满足自动往返过程中各种不同的特殊形式要求;可以很方便的实现通过单片机对直流减速电机前进、后退、停止等操作。
考虑到小车必须能够前进、倒退、停止,并能灵活专性,选用L298双全桥步进电机专用驱动芯片。内部包含4信道逻辑驱动电路,可以方便的驱动两个直流电机或一个两相步进电机。为了能控制车轮的转速,可以采取PWM调速法,即由单片机的P1.4和P1.5输出一系列频率固定的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电机上的平均电压,从而可以改变电机的转速。左右两轮两个电机转速的配合就可以实现小车的前进、倒退、等功能。
2.3 黑线探测模块
黑线探测的原理是光线照射到路面并反射,由于黑线和白线的反射系数不同,可根据接收到的反射光强弱判断是否到达黑线。考虑到环境光干扰主要是直流分量,如果采用带有交流分量的控制调制信号,则可大幅度减少外界干扰;另外,红外发生管的最大工作电流取决于平均电流,如果使用占空比小的调制信号,在平均电流不变的情况下,瞬时电流可以很大(50~100 mA),这样也大大提高信噪比。设计采用红外线光电反射传感器,鉴于车底盘低,采用近距离有效的光电传感器(LTH1550),是由高发射功率红外广电二极管和高灵敏度光电体管组成。检测距离可调整范围为4~15 mm;采用非接触检测方式。为了减少环境光的干扰,需要调整传感器的方位使环境光不能直接射到探测器。最佳探测距离为6~14 mm,在安装时应与地面保持10 mm左右的距离。
2.4 测速、测距传感器
由于小车车轮较小,U型传感器适用于精度较高的场合,可以在车轮上加较多的黑线来满足脉冲计数的精度要求。采用U型红外光电传感器,在电机转轴上加装测速码盘,可以在安装好小齿轮后,将测速码盘安放在小齿轮下,当作光电编码盘,当电机转动时,带动码盘转动,利用红外传感器对不同颜色的物体反射的光线强度的不同,改变接收管的导通和截止。用外部中断对接收到的信号进行计数。
U型传感器可以精确的计算出小车的里程。将码盘固定于小车后轮上,将U型光电开关架于码盘之上。电机旋轴转动,带动测速码盘转动,测速码盘上刻有许多狭缝,码盘转动时发射光透过狭缝被接收元件接收,光电开关就会不断地发生导通和截止。这样在光电开关的输出端就会得到脉冲,用计数器对接受到的信号进行计数。
2.5 液晶显示模块
系统主要需要显示小车运行时间、里程等各个测量参数。采用LCD1602液晶显示,用自带中文字符库的液晶显示模块,显示方便美观,显示信息量大,显示速度较快。采用串口通讯的显示方式,可以大大节省单片机的IO口。
3 主电路工作原理分析
小车开始置于快速前行状态,红外传感器LTH1550检测地面黑线,信号通过单片机的P1.0传回微处理器,经处理器判断分析,根据到达不同的信号,通过P1.4、P1.5输出不同占空比的PWM波驱使电机,使小车置于不同的前行状态,实现自动加速、限速、减速、刹车、倒车等功能。返回起跑线后微处理器从自身计时功能TBR取出行驶时间,在LCD1 602显示,同时经U型传感器检测的里程信息经单片机的P2.3传回微处理器处理后在显示器上显示。
