利用MEMS和MR传感器在嵌入式系统姿态中的测量
介绍
传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行器导航和姿态测量中得到了广泛的研究和应用。
然而,传统的姿态测量系统包括捷联式惯导普遍具有体积大,重量大,复杂程度高等特点,使得传统的姿态测量系统无法应用于日常应用。同时,传统的捷联惯导系统一般需要一个寻北系统的辅助来获得载体的方位角,但是传统的寻北系统多为基于陀螺的系统,其体积和复杂度也是日常应用所无法接受的。可见,对于对体积具有严格限制的嵌入式系统而言,需要研制一种小型的姿态测量系统来满足其姿态测量的要求。MEMS技术和MR技术的快速发展,为研制这种低成本,小体积,高集成度的姿态测量系统提供了可能,从而可以使得对体积和成本敏感的系统具有姿态测量的能力。
本文论述了由MEMS加速度计和MR传感器组成的姿态测量系统。在本系统中,三轴MEMS加速度计用来获得载体基于重力向量的俯仰角和横滚角,而三轴MR传感器的输出经过以俯仰角和横滚角为参数的矩阵变换后可以给出载体相对于地磁北极的方位角。
硬件描述
本论文论述的姿态测量系统主要由三轴MEMS加速度计,三轴MR传感器,ARM内核微控制器和用于显示结果的LCD显示器组成。
微处理器
本系统选用的微处理器为Atmel公司的At91sam7s64 ARM微控制器。At91sam7s64是基于32位ARM内核的低管脚数高性能并且内置Flash的微控制器。其内部集成了64k字节Flash和16k字节的SRAM以及大量的外设接口,例如两个USART接口,可以分别用来与PC机通信和控制串口LCD屏显示测量结果。其具有一个10位的SAR逐次逼近式A/D转换器,并具有8选1模拟复用器。A/D转换器的采样率可以达到384ksps.At91sam7s64的ARM内核的最高运行频率可以达到55MHz,0.9Mips/MHz,以上的特点使At91sam7s64非常适合于低成本体积敏感的姿态测量系统。
硬件结构
本系统的硬件结构如图2所示。由于At91sam7s64具有片上A/D转换器而且具有8选1模拟复用器,使得MMA7620Q和HMC2003可以直接与微控制器相连而不必外加A/D转换器和复用器,不仅降低了系统的成本和体积,提高了系统的集成度,同时减少了误差源,提高了精度。经过A/D转换的测量数据经过ARM核的处理后,被送到串口LCD并通过RS232接口送入PC机进行进一步的分析。
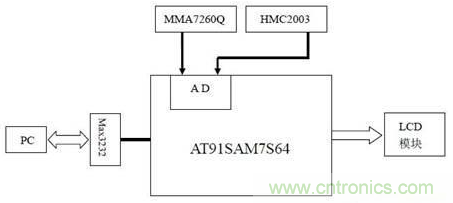
图1:系统硬件结构
姿态参数的获得
在本系统中,三轴加速度计和三轴MR传感器都以以下的方式安装于电路板上:它们的X轴平行于系统的横轴指向右,Y轴平行于系统的纵轴指向前,X、Y、Z轴定义为右手坐标系统,如图2所示。
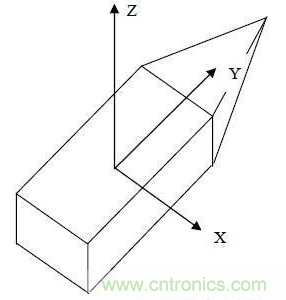
图2:系统坐标
俯仰角与横滚角的获得
为了获得系统基于重力向量的俯仰角θ和横滚角φ,需要使用加速度计的三个输出:Ax, Ay, Az.俯仰角和横滚角可以通过以下公式(1)和公式(2)计算得到。对于微控制器,函数中的arctan(x)需要通过以下公式(3)的泰勒展开后才能计算得到。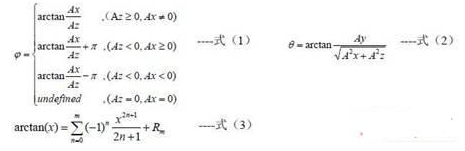
方位角的获得
为了获得系统相对于当地地磁向量的方位角,需要使用MR传感器的三个输出Mx, My, Mz.当系统置于水平状态时(俯仰角和横滚角都为0)时,方位角ψ可以由公式(4)直接给出,但是在大多数情况下,系统并不是工作在水平状态,此时地磁场的竖直分量将会影响Mx和My的值,因此不能直接由公式(4)获得相对于地磁向量的方位角。为了在所有情况下都能获得正确的方位角,必须将俯仰角和横滚角考虑在内,即必须通过以俯仰角和横滚角为参数的坐标变换,将测得的(Mx, My, Mz)向量变换为与载体坐标系有相同方位角的水平坐标系下的向量(M‘x , M’y, M‘z),其变换矩阵如公式(5)。
至此,系统的3个姿态参数全部由公式(1)(2)(7)给出。
误差分析
本文论述的姿态测量系统主要由MEMS加速度计和MR传感器组成。由于现有MRMS技术的限制,其精度和传统的加速度计还有一定的差距,这将给所得到的俯仰角和横滚角带来更大的误差。MR传感器是对磁场敏感的器件,当其被放置在铁磁环境中的时候,地球的磁场将受到附近铁磁环境的扭曲,这将导致方位角的误差。然而这种由于附近铁磁物质的影响而引入的误差是可以补偿的。
结论
使用MEMS加速度计和MR传感器构成的姿态测量系统有效的降低了整个系统的体积、成本以及功耗,使得嵌入式系统也可以引入姿态测量的功能。本文论述的姿态测量系统非常适用于汽车导航,机器人姿态测量等领域。本文的创新点在于使用MEMS和MR元件构造了应用于嵌入式系统中的姿态测量系统,并详细给出了各姿态参数的计算方法。
