三相混合式多细分步进电机驱动器
中心议题:
- 步进电机的细分控制原理
- 驱动器的系统构成
- 性能指标及目前的应用情况
- 输入信号采用光电隔离
- 采用IGBT为输出级的功率电子开关
- 自动半电流锁定
- 断电保护功能(断电自动相位记忆功能)
步进电机是一种开环伺服运动系统执行元件,以脉冲方式进行控制,输出角位移。与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误差。但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高等到,又严重制约了步进电机的应用范围。步进电机的运行性能与它的驱动的应用范围。
步进电机的运行性能与它的驱动器有密切的联系,可以通过驱动技术的改进来克服步进电机的缺点。相对于其他的驱动方式,细分驱动方式不仅可以减小步进电机的步距角,提高分辨庇,而且还可以减小步进电机的步距角,提高分辨率,而且还可以减少或消除低频振动,使电机运行更加平稳均匀。总体来说,细分驱动的控制效果最好。因为常用低端步进电机伺服系统没有编码器反馈,所以随着电机速度的升高其内部控制电流相应减小,从而造成丢步现象。所以在速度和精度要求不高的领域,其应用非常广泛。
因为三相混合式步进电机比二相步进电机有更好的低速平稳性及输出力矩,所以三相混合式步进电机比二相步进电机有更好应用前景。传统的三相混合式步进电机控制方法都是以硬件比较器完成,本文主要讲述使用DSP及空间矢量算法SVPWM来实现三相混合式步进电机的控制。
细分原理
步进电机的细分控制从本质上讲是通过对步进电机的定子绕组中电流的控制,使步进电机内部的合成磁场按某种要求变化,从而实现步进电机步距角的细分。最佳的细分方式是恒转矩等步距角的细分。一般情况下,合成磁场矢量的幅值决定了电机旋转力矩的大小,相邻两合成磁场矢量的之间的夹角大小决定了步距角的大小。在电机内产生接近均匀的圆形旋转磁场,各相绕组的合成磁场矢量,即各相绕组电流的合成矢量应在空间作幅值恒定的旋转运动,这就需要在各相绕相中通以正弦电流。
三相混合式步进电机的工作原理十分类似于永磁同步伺服电机。其转子上所用永磁磁铁同样是具有高磁密特性的稀土永磁材料,所以在转子上产生的感应电流对转子磁场的影响可忽略不计。在结构上,它相当于一种多极对数的交流永磁同步电机。由于输入是三相正弦电流,因此产生的空间磁场呈圆形分布,而且可以用永磁式同步电机的结构模型(见图1)分析三相混合式步进电机的转矩特性。为便于分析,可做如下假设:
•电机定子三相绕组完全对称;
•磁饱和、涡流及铁心损耗忽略不计;
•激磁电流无动态响应过程。

1234下一页> 关键字:三相混合 步进电机 驱动器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80006533
U、V、W为定子上的3个线圈绕组,3个线圈绕组的轴线互差120°。电机单相绕组通电的时候,稳态转矩可以表达为:
T=f(i,θ)
式中:i为绕组中通过的电流;
θ为电机转子偏离参考点的角度。
由于磁饱和效应可以忽略不计,并且转子结构是圆形,其矩角特性为严格的正弦,即
T=kIKsin(θ)
式中,k为转矩常数。
若理想的电流源以恒幅值为I的三相平衡电流iU、iV、iW供给电机绕组,即:
iU=Isin(ωt)
iV=Isin(ωt-2π/3)
iW=Isin(ωt+2π/3)
则电机各相电流产生的稳态转矩为:
TU=kIsin(θ)
TV=kIsin(θ-2π/3)
TW=kIsin(θ+2π/3)
稳态运行时,θ=ωt,则三相绕组产生的合成转矩为:
T=TU+TV+TW=(3/2)kIsin(π/2-ωt+θ)kI
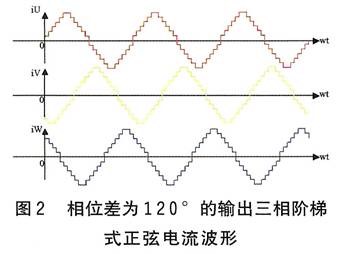
以上分析表明,对于三相永磁同步电机,当三相绕组输入三相对称的正弦电流时,由于在内部产生圆形旋转磁场,电机的输出转矩为恒值。因此,将交流伺服控制原理应用到三相混合式步进电机驱动系统中,输入的220V交流,经整流后变为直流,再经脉宽调制技术变为三路阶梯式正弦波形电流(见图2),它们按固定时序分别流过三路绕组,其每个阶梯对应电机转动一步。
通过改变驱动器输出正弦电流的频率来改变电机转速,而输出的阶梯数确定了每步转过的角度,当角度越小的时候,那么其阶梯数就越多,即细分就越大,从理论上说此角度可以设得足够的小,所以细分数可以是很大,而交流伺服控制的每步角度与反馈的编码器的精度有很大的关系,一般使用的为2500线,所以每一步转过的角度仅为0.144°(即360/2500),而此方法控制的步进电机,比如其细分数为10000,则每一步转过的角度为0.036°,所以比一般的伺服控制精度高很多。当然,步进电机转动时,电机各相绕组的电感将形成一个反向电动势,频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降,通过恒流方式可以使在电机低频和高频时保持同样的相电流从而使高频的力矩特性有所改善,这只能是在低速时,所以其综合性能(高、低速噪声,高速力矩,高速平稳性等)很难赶超交流伺服控制系统。
三相混合式步进电机一般把三相绕组连接成星形或者三角形,按照电路基本定理,三相电流之和为零。即iU+iV+iW=0。所以通常只需产生两相绕组的给定信号,第三相绕组的给定信号可由其它两相求得。同样,只需要对相应两相绕组的实际电流进行采样,第三相绕组的实际电流可根据式求得。
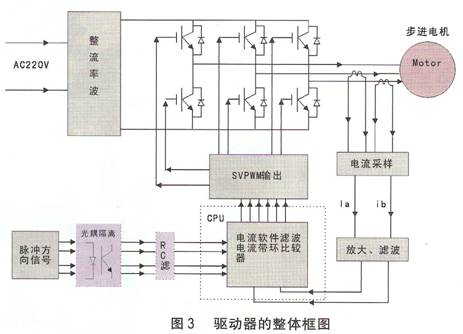
三相混合式步进电机驱动器的系统构成
驱动器的总体方案如图3所示,主要包括单片机电路、电流追踪型SPWM电路和功率驱动电路组成。
 <上一页1234下一页> 关键字:三相混合 步进电机 驱动器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80006533?page=2
<上一页1234下一页> 关键字:三相混合 步进电机 驱动器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80006533?page=2 DSP模块设计
在这里,笔者选择了TI公司的DSP作为CPU芯片,DSP(DigitalSignalProcessor)实际上也是一种单片机,它同样是将中央处理单元、控制单元和外围设备集成到一块芯片上。但它又有自身鲜明的特点——因为采用了多组总线技术实现并行运行的机制,从而大大提高了运算速度,具有更强的运算能力和更好的实时性。本文选用的DSP(TMS320LF2407A)是一款电机控制专用芯片,144引脚,具有丰富的IO资源,含有4个通用定时器,具有两路专用于控制三相电机的PWM发生器(可产生六路PWM信号),另外还有专用接收外部脉冲和方向的I/O口,从而简化了电路设计和程序开发。
DSP输入信号包括步进脉冲信号CP、方向控制信号、脱机信号,过流保护信号。这几种信号均通过高速光耦连接到DSP的引脚上,另外还有细分步数及电流选择信号。当脱机信号为有效时,驱动器输出到电机的电流被切断,电机转子处于自由状态(脱机状态)。反馈电流通过DSP自带的10位模数转换器(AD)采样,反馈的电流通过一定的算法后,由DSP自带的PWM口输出控制电机。
电流追踪型回路
这种传输方式以模拟电压的幅值代表采样电流或者电压的大小,其主要用来采样a,b两相电流及母线电压检测,实现电机电流控制以及过压、欠压、过流保护。驱动器通过采样电阻检测步进电机绕组的实际电流,与设定电流相比较后经过滞环比较器调节器,调节器输出信号经过滞环比较器调节器,调节器输出信号由20kHz频率的三角波输出,形成空间矢量脉宽调制信号(SVPWM),通过功率驱动接口电路来控制大功率半导体器件的导通与关断,使步进电机的绕组实际电流跟踪给定参考信号,按给定的正弦规律变化。
功率驱动电路
驱动器的主回路采用交—直—交电压型逆变器形式,由整流滤波电路、三相逆变器以及步进电机等组成。整流滤波电路构成直流电压源,完成200V、50Hz交流电源到直流电源的变换。逆变器实现从直流电到变频变压交流电的转换,为三相混合式步进电机的定子绕组提供要求的交流电流。逆变器由仙童公司生产的六只G30N60B3DMOS管组成,构成三相逆变桥,驱动器采用两只电阻检测步进电机相电流的瞬时值。功率驱动电路的核心是功率模块(MOS管),MOS管与电流追踪型PWM输出之间必须通过专用高速光耦连接,根据MOS管的过流值和电机峰值线电流的峰值小于MOS管的最大电流值。
本设计中电机最大相电流为8.1A,该电流是相电流的有效值,峰值相电流为11.312A(即8.1sqrt(2))。此外,电机绕组在三角形接法时,线电流是相电流的三倍,所以线电流峰值为19.6A。由G30N60B3DPDF文档知,其最大流值为30A,故可以保证正常使用。正常工作要求适当的散热设计保证内部结温永远小于150℃,因此要外加散热器并强制风冷,以保证MOS管正常工作。
并口通讯
为了避免在控制过程中停电或者其它特别原因掉电时造成损失,使用带电RAM存储电机位置,保证来电后工件可继续完成加。并口RAM比传统使用的E2PROM速度传输更快更可靠,可更有效的记录电机运行状态,但占用的I/O口较多,这里CPU有足够的资源可以使用。
<上一页1234下一页> 关键字:三相混合 步进电机 驱动器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80006533?page=3
控制软件流程
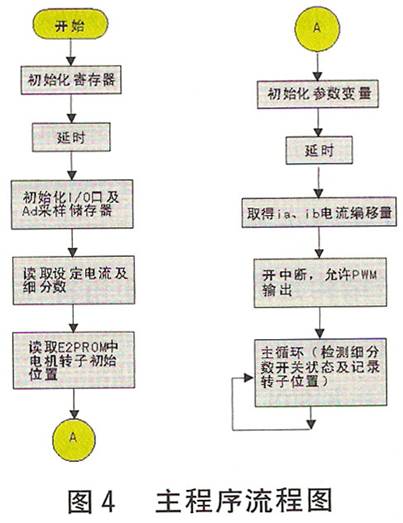
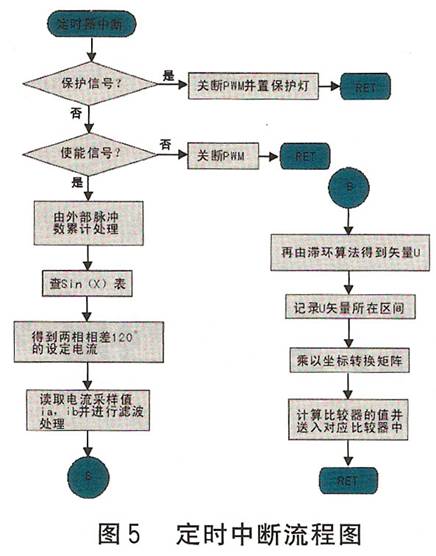
图4示出主程序流程图,图5示出定时中断流程图。为减少功耗和保护电机,设置了自动半电流功能(静态锁轴或没有脉冲输入时电流减半),它由滞环比较器自动进行调节。
性能指标及目前的应用情况
设计后所达到的性能指标:
•输入交流电压可为90V~275V;
•输入信号采用光电隔离;
•采用IGBT为输出级的功率电子开关;
•SVPWM(正弦空间矢量脉宽调制),三相恒流标准正弦波输出,三角载波频率为20kHz;
•自动半电流锁定;
•断电保护功能(断电自动相位记忆功能);
•电流控制灵活可选(2.0A~8.1A),适配86、90、110、130座号的三相各系列电机;
•脱机(FREE)功能;
•噪音低、发热量小、效率高、运行特性良好;
•本驱动器为单脉冲(P+D)控制模式;
•目前所做的最大细分数为16000p/r,最小为600p/r,主要由用户而定,可以做得更小也可以做得更大。
实践证明本文所讲的驱动方法其适应性很强,基本上可以适应所有的三相混合式步进电机。特别对三相绕组星形接法,低频时运行平稳,无振荡,有效地抑制了振荡、噪音。另外,驱动器内部设计多种保护电路,使整个驱动器的可靠性大大提高。
<上一页1234 关键字:三相混合 步进电机 驱动器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80006533?page=4
