针对智能化电机车防撞系统的可行性研究
中心议题:
- 智能化电机车防撞系统的特点
- 智能化电机车防撞系统的组成
- 智能化电机车防撞系统的要求
- 智能化电机车防撞系统的工作原理
解决方案:
- 井下智能化电机车防撞系统方案
- 采用红外线作为距离探测光源
1 对比分析
目前大多电机车的防撞装置是靠弹性碰头被动地缓冲和吸收部分碰撞能量,来减轻撞击危害的,但真正发生机车相撞时其防撞作用是微不足道的。煤矿井下环境特殊、巷道狭窄,岔道弯道较多,巷壁距道轨最大不足1 In。当电机车行驶到弯道和岔巷时,安装在电机车自身的发射器发出的电磁波或光线很容易被巷道墙壁或临道过往车辆反射而造成刹车装置误报警误动作。其次,刹车装置靠手闸、电机杠杆等机械机构制动,反应速度或慢或急,制动不平稳,同样容易导致车辆掉道或设备损坏,甚至造成人员受伤。所以,此类刹车装置用于煤矿井下不适宜,还可能留下安全隐患。
根据多年的经验教训、理论知识和事故案例,结合目前市场上多种车辆防撞装置的特点,设计了一种井下智能化电机车防撞系统方案。
2 系统特点
1) 井下智能化电机车防撞系统采用红外线作为距离探测光源,抗干扰能力强,可靠性高,不受电机车大灯、巷道照明、工人矿灯以及其他电磁波的干扰。红外发射器和接收器分体安装,不会因车辆或巷道墙壁反射信号而误动作。
2) 该系统运用单片计算机作为主控制器,利用其超强的数据运算和信息处理能力,真正实现了智能化和自动化目的,极大地提高了系统的可靠性、稳定性和智能化水平,使电机车运行获得更安全的保证。
3) 当电机车驶入前方红外线的不同射程内时,本系统能自动依靠微电脑单片机对电机车当前运行速度和相对距离进行运算来发出声光报警信号,必要时启动制动程序控制比例电磁阀的节流,使撞车危险发生前实现软制动,刹车既迅速又平稳,保证了人员和车辆设备的安全,不致于因剧烈碰撞和刹车过猛造成二次不必要的人员和设备损失。
4) 倘若再增加上LED或LCD显示装置,则系统会更直观更完善,功能会更强大。
3 系统组成
该智能化电机车防撞系统主要由红外发射单元、红外接收单元、主控制单元、执行单元、声光报警单元、液压制动单元几部分组成。
红外线发射单元包括编码调制器、载波振荡器、电子开关、发射管、聚光透镜等组成;红外接收单元为红外集成一体化接收头;主控制单元由单片机、时钟电路、复位电路、手动操作键盘、D/A转换器组成;执行单元由光电隔离器、模拟放大器组成;声光报警单元由电机车电笛和闪光报警电路构成;液压制动单元由速度传感器、液压油泵、比例电磁阀、溢流阀、液压油缸、刹车推杆等组成。
4 系统要求
1)《煤矿安全规程》规定:“两机车或两列车在同一轨道同向行驶时,必须保持不少于100m的距离。运送人员时列车的制动距离不得超过20m”。其次,井下大巷弯道一般最小曲率半径在25Ill左右。因此,本系统按最危险的同一轨道相向行驶来计算并设定系统参数。红外线发射单元中,三个红外发射管发射距离分别调整为报警距离80m、一般制动距离50m、紧急制动距离7m三种。
2)考虑到煤矿井下环境潮湿,特别是夏季轨道面黏着系数更低很容易打滑,所以电机列车的制动距离设定为报警、20m、2m三种,这样列车制动后仍留有一定的缓冲距离,防止打滑影响机车的制动效果。根据三角函数公式α=2arctan(a/b)(其中a为最大光束半径,b为光束射程即最大发射距离)算出红外线管发射角度分别为44‘,68’和8°,即每个发射管的最大射程为80m、50m、7m时最大光束直径均为1m(电机车的宽度),光束正好覆盖了电机车端面,又不影响到其它车辆,保证了灵敏度和可靠性。
3) 根据单片机每一时刻只能处理一路信号的特点,须将每个发射管的高频调制脉冲的占空比控制在1/3以下,使其依次轮流工作,既减小了工作电流,降低了功耗,又不使信号相互干扰,造成误测,提高系统的可靠性。
4)根据《煤矿安全规程》井下最高限速直行道5m/s,弯道2m/s的规定,在程序参数设定时要求:当电机车进入设定的制动距离时,单片机按公式a=V2/2L计算刹车加速度(其中V为当前车速,为最大制动距离),即单片机将刹车加速度自动控制在0.6~4m/s2之间,并发出制动指令,调节比例电磁阀控制制动压力,使列车在规定位移内平稳地制动停车。
12下一页> 关键字:智能化 电机车 防撞系统 本文链接:http://www.cntronics.com/public/art/artinfo/id/80016085
5 工作原理
智能化电机车防撞系统原理,见图1。
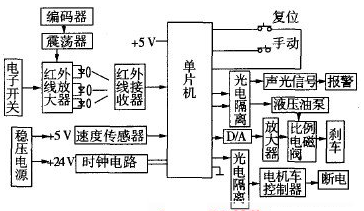
图1 智能化电机车防撞系统原理
1) 红外线发射单元的编码调制器的三种不同编码信号对38 kHz的载波信号进行调制,产生三种不同频率的调制信号送至放大器以驱动三个红外发射管,发射出三种不同编码的红外线。根据单片机每一时刻只能处理一路信号的特点,三路放大器由电子开关控制其依次导通,保证每一时刻只有一路发射管工作,这样既减小了工作电流,降低了功耗,又避免了信号相互干扰,造成接收器误测。
通过对发射管选型和调整放大器发射功率使发射距离分别为S1=80m,S2=50m,S3=7m;通过调整各自透镜组的焦距使光束射角分别为α1=44仅α2=68’,仅α3=8°,使每个发射距离的临界处光束直径都是1m,正好覆盖住电机列车的端面,既保证了接收又防止了对相邻车道车辆的干扰。发射单元安装在电机车的照明大灯下方和列车尾灯下方适当位置,由于井下轨道运输电机车、列车双向行驶不分头尾,所以机车和列车(矿车)两端都分别安装红外发射器。红外接收头安装在电机车头与发射单元正对的位置。
2) 红外线接收器采用红外线一体化接收头,它是集红外接收、信号放大、带通滤波、比较输出等为一体的模块,性能稳定、可靠。无需A/D转换器转换可以直接与单片机端口连接。接收器的信号入射角为最小的4。,这样不论是直道还是弯道,其信号接收都不会受对面邻道相向行驶的电机车所发出的红外线干扰,除非行驶在同一轨道。
3) 采用单片计算机作主控芯片控制是实现智能化控制的真正意义所在。运用单片计算机可使电路简化,结构简单,功能增强,检测控制自动化,工作更可靠,运行更安全。关于单片机的程序编制和应用不算太难,由于篇幅在此不叙。
4) 红外线发射器不间断地依次向前方发射着三种不同射程不同编码的红外线波,以利单片控制器接收并判断电机车当前所处的位置,然后发出相应的报警或制动指令。当电机车由于某种原因在同一轨道行驶而进入前方车辆的报警距离S1(80 m)时,接收器接收到前方发出的红外信号迅速传送到单片机,由单片机进行数据处理,分析判断后经光电隔离分两路输出,一路接通电机车号笛和闪光信号电路,发出声光报警,以提醒本车司机和对面电机车司机,注意减速慢行,保持车距;一路迅速启动液压油泵,为刹车作准备。如果车辆减速,退出报警距离后,系统自动解除警报,断开液压油泵电源。
如果电机车没有减速继续前进,进入一般制动距离S2(50 m)时,接收器把接收到的红外信号传送给单片机,单片机识别到是制动信号后,立即发出指令,断开电机车主电机的控制回路,主电机断电,使列车处于滑行状态。同时立即与霍尔速度传感器反馈的当前车速进行运算,对比分析,然后按照预设的制动加速度发出制动指令,控制电流经D/A转换、模拟放大后调节比例电磁阀的开启量,自动调整液压泵产生的制动力矩,使液压油缸的输出压力逐步增加,在20 m内实现平稳停车。
如果电机车在弯道或远距离视线被遮挡的情况下发现前方车辆时,已经进入紧急制动距离 ,即两车相距7 m左右(其中R为轨道曲线半径,按25 m计算),此时接收器接收到对方发来的紧急制动红外信号后,单片机立即发出紧急制动指令,以较陡的制动加速度来控制比例电磁阀的打开,较大的制动力矩使列车在2 m之内迅速刹车。同时又能防止因紧急刹车导致制动闸包死现象。
5) 机车制动后需按压复位按钮才能使系统发出解除制动指令,退出制动状态。本系统设定为手动控制优先于自动控制,按压手动制动按钮就可随时进行一般制动,省去转动刹车手轮的繁琐操作,方便快捷。
6 结论
要减少和避免轨道运输事故的发生,除了加强思想教育、技术培训,提高机车司机的技能素质,加强责任心外,最根本的就是要完善必要的装备,实行自动化控制。人机双管齐下,才能真正有效地控制机车事故的发生、实现安全生产的目标。智能化电机车防撞系统的应用是实现轨道运输无事故的有力技术保障措施.
