微型测距雷达的原理及组成
中心议题:
- 微型测距雷达的原理及组成
- 微型测距雷达各部分的组成
- 控制软件的流程
- 脉冲法测距
- 调频连续波法测距
- 相位法测距
1微型测距雷达的原理及组成
1.1测距方法
通常雷达测距的方法有三种:脉冲法测距;调频连续波法测距;相位法测距。常用的为前两种。脉冲法测距分辨率要达到距离精度1m以下,脉冲宽度必须小于6.67ns,即使当今脉冲雷达普遍采用脉冲压缩的情况下,精度要做到厘米级是相当困难的,何况是以增大接收机带宽,降低接收灵敏度为代价,电路上也难以实现。因而对于较精确的距离测量,一般都采用调频连续波测距的方法。
调频连续波测距有三角波调制和正弦波调制两种,这里选择三角波调制。
在三角波调制中,测距公式为:
式中:R为距离;c为光速;
为三角波正向发射频率与接收频率之差,fb-为三角波负向发射频率与接收频率之差;f为三角波调制频率;△fm为受调制的发射频率最大频偏的二分之一。
三角波调制频率的选择与距离分辨率有关。假如选择f=200Hz,△fm=100MHz,而此时测出的频率fbav为50kHz,则可以计算出R≈93.7500m;如果测出的频率fbav=50.001kHz,R=93.7518m,二者之差为1.8mm,即每1Hz代表1.8mm的距离。提高调制频率f的值,分辨率还可以增加。假如f=1000Hz,其他参数不变,同样测出的频率fbav=50kHz,R=18.750Om;fbav=50.001kHz,R=18.7504m,相差0.4mm,每1Hz代表O.4mm的距离。
如果是运动目标,根据测速公式:
求出运动目标的速度。式中V为目标的径向速度,λ为发射微波的波长。当然,固定目标的fb+与fb-的值相等。
1.2组成
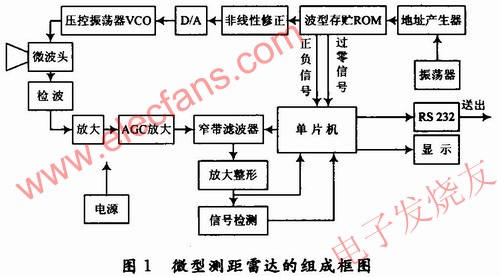
根据三角波调制的雷达原理,首先必须有一个微波头,微波头可在测速微波头的基础上,将体效应振荡器加一个变容管改为压控式振荡,直接混频。同时还需要一个三角波发生器。为了修正压控振荡器的非线性,使之频率线性变化,必须进行非线性修正。
为了增强效果,可采用模拟滤波器组进行积累处理。当然也可以通过高速A/D采样后将模拟信号变为数字信号用DSP进行数字信号处理,不过成本较高。
和工控机、PC104模块相比,采用单片机控制电路比较简单,且成本较低,由于没有复杂的运算,速度完全能够满足要求。
这个设计功耗较小,用电池就可满足电源供给要求。
微型测距雷达的组成框图如图1所示。
 12下一页> 关键字:测距雷达 微波头 窄带滤波器 三角波发生器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80008109
12下一页> 关键字:测距雷达 微波头 窄带滤波器 三角波发生器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80008109 1.3工作原理
三角波调制频率选200Hz,D/A选择12位,ROM为16位数据输出,12位数据作为D/A的输入;一位作为三角波正斜率和负斜率变化时的脉冲输出,正斜率为“1”,负斜率为“0”;另一位作为一个三角波周期间的过零信号,送单片机的中断INT0,当三角波正负斜率变化时,输出脉冲信号。单片机产生过零中断后,判断正负信号,为“1”,得到的是fb+;为“O”,得到的是fb-。
雷达工作时,单片机控制窄带滤波器不断的进行扫描,当某一个滤波器有信号时,由可重触发单稳态电路组成的信号检测电路输出由“0”变为“1”,单片机根据输出的窄带滤波器获得带内频率,判断出精度不太高的距离范围,利用放大整形输出进行计数或测量脉冲的周期,获得足够精确的频率值,即为准确距离。根据公式计算出R和V送显示器予以显示,或通过RS232串口送上一级的计算机系统。
2各部分的组成
2.1微波头
微波头包括喇叭天线、体效应振荡器、环行器、混频器。体效应振荡器产生发射微波,喇叭天线作为微波对外收发之用,环行器将收发进行隔离,混频器取出发射频率和接收频率的差值。微波头国外常用的有24GHz,35GHz和77GHz,可采用Wisewave公司的产品。其功率输出为+10dBm,频偏DC为100MHz,波束宽度120,园极化。
2.2三角波发生器
三角波发生器采用数字形成。D/A为12位,要产生200Hz的调制频率,则振荡器约为0.8192MHz。考虑到一般晶体的频率为MHz量级,地址产生器为一个13位的计数器,选用74HC4040,计数器不用最低位,那么振荡器的频率为200Hz×212×2=1.6384MHz,可以用TTL门电路作振荡器,这个设计用的是74HC04。
波形存储选用E2PROM芯片AT28C64,晶体选用1.6834MHz。最重要的一点是必须测出微波头的非线性曲线,以便在非线性修正ROM中装入修正数据,简化起见,可以在波形存储ROM中烧制修正数据,无须再加专用的非线性修正电路。
2.3窄带滤波器
模拟器件的发展与集成为小型化提供了充分的条件,像松下公司的MN6515,仅为8脚,其带通滤波器的中心频率f0可由外加的时钟频率fcp控制,其比值fcp/f0约为15.7。只要改变fcp的值,带通滤波器的中心频率就会在O~32kHz范围内移动,非常方便,可采用图2方式进行控制。

另外还有一种窄带滤波器MAXIM的MAX262,由编码输入控制f0和Q的值,共有64阶滤波器,128级Q值控制。同时也可以控制振荡频率,由多片MAX262组成,使窄带滤波器的阶数达到几百甚至上千。控制Q值的不同,在频率的低端到高端,可以将窄带滤波器的3dB带宽设计成相同或相近的宽度。
2.4放大与AGC放大电路
前级放大电路可采用各公司的低噪声运放,AGC电路选用AD公司的AD603,或BB公司的VGA610,放大整形可选用TI公司或其他公司新出的R~R输出的运放。
2.5单片机
单片机选用Atmel公司的AT89C51,也可选用其他公司的单片机,如PIC或AVR系列。这些单片机都是低成本且为人们所常用。
3软件组成
软件用汇编语言编写,流程图如图3所示。

低成本微型测距雷达经实验在原理上是行得通的,但距离较近,实际测试后发现微波头采用直接混频方式输出灵敏度较低。下一步改进需要增加一个中频,放大后解调,再进行视频放大。
对于要求测距更远的雷达,可通过增加发射功率,增大天线面积的方法。当功率较大时,考虑到连续波雷达泄露的影响,需要将发射天线与接收天线分开。对于更近距离的测量,例如小于2~3m,可采用超声波测量。微型测距雷达的用途非常广阔,今后必将大量用于民用的许多领域。
<上一页12 关键字:测距雷达 微波头 窄带滤波器 三角波发生器 本文链接:http://www.cntronics.com/public/art/artinfo/id/80008109?page=2
