马达控制及驱动技术的新进展
中心议题:
- 磁场定向控制技术
- 无位置传感器控制技术
- 变速驱动设计的HVIC技术
- 三相混合式多细分步进电机驱动器设计

相关阅读:
马达设计的技巧
http://www.cntronics.com/public/art/artinfo/id/80006683
高性能和高效马达控制器设计
http://www.cntronics.com/public/art/artinfo/id/80004931
基于一种低成本的新型步进电机驱动器的研制
http://www.cntronics.com/public/art/artinfo/id/80012061
高效节能是目前电子产品设计总的发展趋势,因此,电子产品对驱动马达的高效率和低功耗提出了更高的要求。在此要求之下,马达的控制系统设计以及驱动器设计在小型化、高效率、低噪声和更高的可靠性方面有了更进一步的发展。本文介绍马达控制技术(包括控制器和驱动器的设计技术)的最新进展,主要从磁场定向控制技术、无位置传感器控制技术、HVIC驱动设计技术及三相混合式多细分电机驱动器设计技术的角度进行分析。
磁场定向控制提升性能和功效
磁场定向控制(Field-Oriented Control, FOC), 有时也称之为磁束矢量控制——是一种能够使永磁同步电机(或无刷伺服电机)在整个速率范围内获得最高性能的方法。其特点是通过坐标变换技术把交流电机的定子电流分解为转矩和励磁分量,从而实现象直流电机一样控制电机的输出转矩和磁通,使交流电动机的控制的动态指标和精度大大提高。
磁场定向控制的总体流程如图1所示:
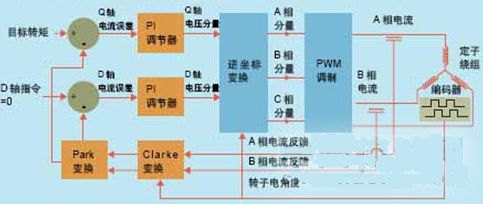
图1 磁场定向控制的总体流程
从控制原理上讲,磁场定向控制方法的电流环运行是独立于电机旋转的。在FOC方法中存在两个实际的电流环,一个用于Q轴转矩,另一个用于D轴转矩。Q轴转矩电流环施以来自伺服控制器的用户目标转矩,D轴电流环则施以零输进指令,以便使不想要的直轴分量降至最低。
FOC的主要优势有以下几点:
- 可提供低速(低至0rpm)大力矩(小于0.5%的力矩波动);
- 即使在高速时也保持高效率;
- 在电压限制范围内磁场弱化时可完全控制
- 力矩和电流响应时间小于0.2ms;
- 电流控制器带宽大于2000Hz。
由于磁场定向控制可为电机提供宽泛的可用速度范围,该方法已成为无刷直流电机的一种重要驱动和换相方法,同样也成为交流感应电机的控制方法之一。采用FOC方法的交流感应电机可以使电机运行效率进步到85%,相比之下,不采用磁场定向方法却只有60%左右。另外,采用FOC方法的无刷直流电机甚至可以达到更高的效率,即高达95%。
123下一页> 关键字:马达 马达控制 电机 电机控制 电机驱动 驱动 本文链接:http://www.cntronics.com/public/art/artinfo/id/80014430
无位置传感器控制技术
在一些应用场合要求使用的电机体积小、效率高、转速高,微型永磁无刷直流电机能够较好地满足要求。无刷直流电机的无位置传感器控制的难点在于转子位置信号的检测,目前国内外研究人员提出了诸多方法,其中反电动势法最为简单、可靠,应用范围最广泛。
实现无刷直流电机电子换相及PWM控制的逆变器主电路如图a所示。采用两两通电方式,即每一个瞬间有两个功率管导通,每隔60°电角度换相1次,每一功率管导通120°电角度。功率管的导通顺序是:V6V1→V1V2→V2V3→V3V4→V4V5→V5V6。
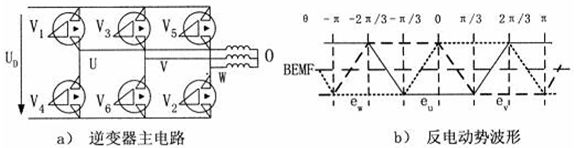
图2 逆变器主电路和点击的反电动势波形图
无位置传感器控制系统以C8051F330单片机、逆变桥电路、端电压检测电路、稳压电路等组成。逆变桥电路中上桥臂为P型MOSFET器件FDS6679,下桥臂为N型MOSFET器件M4410B,均为低电压驱动器件。FDS6679通过一个NPN型三极管驱动,而M4410B由C8051F330的P1口直接驱动(P1口设置成推挽输出)。PWM控制模式定为:PWM仅应用于半桥的下端MOSFET,同时换流的上端(对角线)MOSFET仅起换相通断控制。
电源电压和电流的检测:当UV相通电,在PWM开通期间检测U相的端电压Uu,由于MOSFET的通态电压很小(小于0.1V),端电压uu可以近似看作是电源电压UD;在下桥臂源极和电源地之间串接采样电阻,通过P0.4口检测电阻电压得到电流值,输入信号先经过内部可编程增益放大器放大,再作A/D转换。
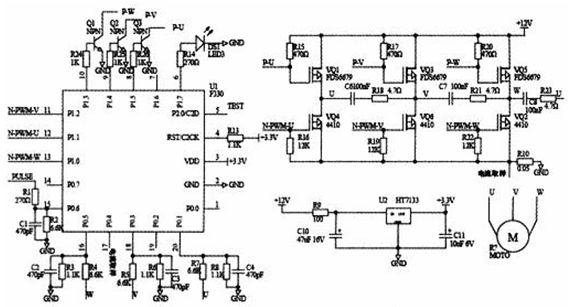
图3 无位置传感器控制系统的硬件电路图
无刷直流电机的无位置传感器控制
http://www.cntronics.com/public/art/artinfo/id/80006685
变速驱动设计的HVIC技术
可变速电机驱动可以提高机器设备的能源效率,最新的HVIC(高压集成电路)技术使得大多数必需的反馈和保护器件可以制作在一个基片上,这样就可以在范围更大的市场和应用里,来实现成本低廉、结构紧凑的可变速驱动。
HVIC技术使得位准移动成为可能,即感测一个漂移在大的普通模式电压上的小差分电压,甚至在快速瞬变的时候。因此,快速而准确的电流感测在电机的相位超前就可实现,从而可以减少硬件设计和信号处理的工作。具体的实现方法是将一个低侧接地CMOS电路和一个高侧浮动CMOS制作到一起,通过N或P沟道LDMOS区域相隔离。LDMOS的作用是位准移动,目的是在低侧和高侧电路之间跨过高压栅来传递控制信号。位准移动电路不受高达50V/ns的快速瞬变的影响,同样也不受来自于IGBT变换器典型的10V/ns噪声的干扰。
<上一页123下一页> 关键字:马达 马达控制 电机 电机控制 电机驱动 驱动 本文链接:http://www.cntronics.com/public/art/artinfo/id/80014430?page=2
电机电流是通过使用一个外部分流晶体管来感测的,HVIC可将小的差分电压(±250mV)通过一个精密电路转换为时间间隔,这个精密电路的纹波去除功能有助于显示小的群延迟。时间间隔是快速瞬变的,会被带到输出端。这样就可以获得与测量电流相对应的模拟输出电压,以便与外部参考电压相比较,最大采样率为40kSPS。对于频率高达20kHz的非对称PWM调制来讲,这个采样速率富富有余。20kHz时的最大延迟小于7.5s,对于被用来IGBT保护的电流感测信号来说也够快了。图4是电流感测电路。
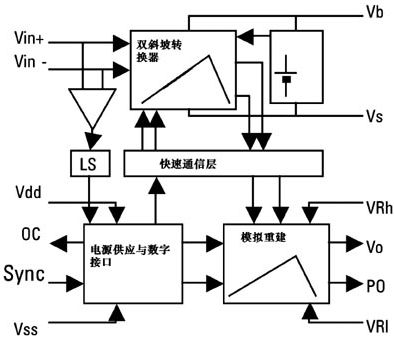
图4 HVIC应用中线性相电流感测电路
变速电机驱动设计的HVIC技术
http://www.cntronics.com/public/art/artinfo/id/80008313
三相混合式多细分步进电机驱动器
步进电机的细分控制从本质上讲是通过对步进电机的定子绕组中电流的控制,使步进电机内部的合成磁场按某种要求变化,从而实现步进电机步距角的细分。最佳的细分方式是恒转矩等步距角的细分。一般情况下,合成磁场矢量的幅值决定了电机旋转力矩的大小,相邻两合成磁场矢量的之间的夹角大小决定了步距角的大小。在电机内产生接近均匀的圆形旋转磁场,各相绕组的合成磁场矢量,即各相绕组电流的合成矢量应在空间作幅值恒定的旋转运动,这就需要在各相绕相中通以正弦电流。
三相混合式步进电机的工作原理十分类似于永磁同步伺服电机。其转子上所用永磁磁铁同样是具有高磁密特性的稀土永磁材料,所以在转子上产生的感应电流对转子磁场的影响可忽略不计。在结构上,它相当于一种多极对数的交流永磁同步电机。
驱动器的总体方案如图5所示,主要包括单片机电路、电流追踪型SPWM电路和功率驱动电路组成。
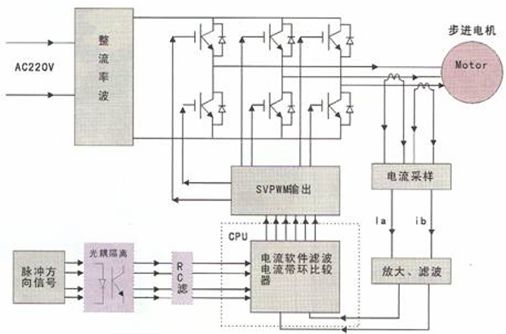
图5三相混合式步进电机驱动器的整体方案框图
其中,单片机电路采用DSP电机控制专用芯片TMS320LF2407A,电流追踪型回路的传输方式以模拟电压的幅值代表采样电流或者电压的大小,其主要用来采样a,b两相电流及母线电压检测,实现电机电流控制以及过压、欠压、过流保护。驱动器的主回路采用交—直—交电压型逆变器形式,由整流滤波电路、三相逆变器以及步进电机等组成。
三相混合式多细分步进电机驱动器
http://www.cntronics.com/public/art/artinfo/id/80006533
总结
以上介绍的马达控制系统设计及驱动器设计技术,在提高马达控制的效率和可靠性,降低功耗,减小尺寸方面的效果非常明显,当然还有很多其他新的设计技术和产品,例如,安森美半导体开发的双极步进电机驱动及控制器AMIS-3062x系列的AMIS-30623可以满足更高能效的要求。工程师可以根据设计的实际需求分析,选择合适的马达驱动和控制方案。
