“自学”成才 | 够聪明的机器人,无需示教

? ? ? ?近年来,受到人口老龄化和出生率降低的影响,世界劳动人口逐渐减少,劳动力短缺是全球共同面临的问题。尤其是在劳动密集型产业,例如制造业工厂、物流行业等,劳动力短缺问题将十分严重,使用机器人实现自动化的需求日趋高涨。
然而,在食品制造业等工厂的装盘和物流中心的分拣等作业工序中,机器人抓取的对象物多种多样,每次都需更新动作程序,专业人员会将大量时间用在对机器人的“示教”上,比人工作业花费更多时间。因此,目前机器人的自动化还未得到理想的发展。
在这样的行业背景下,三菱电机开发了“无需示教的机器人系统技术”,通过高精度语音识别AI※1和对多关节型机器人动作的优化,不需要 “示教”,自动生成机器人动作程序。即使在菜单频繁更换的食品工厂,也能实现装盘和分拣等作业工序的自动化。
※1 Maisart:旨在使所有设备更加智能的三菱电机AI技术商标
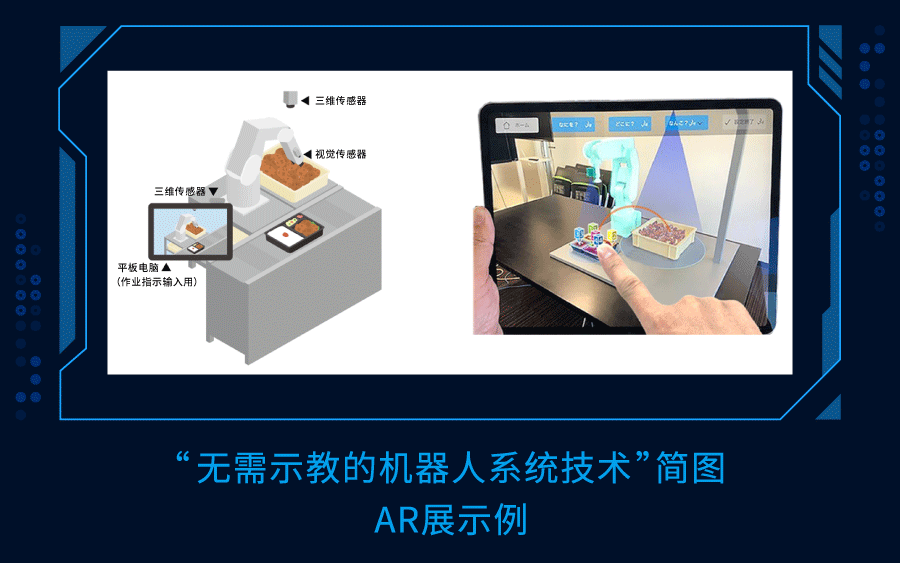
◆ 三菱电机开发了一种简单作业指示技术,通过三维传感器扫描机器人周围区域,以语音形式给出作业指示,可自动生成机器人动作程序,优化机械臂的轨迹;
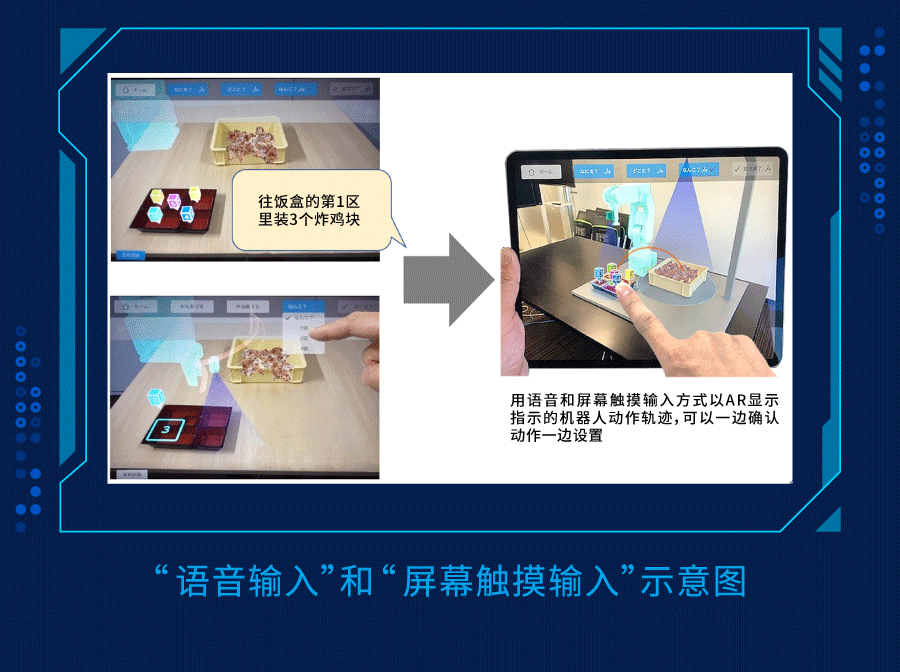
◆ 独创的语音识别AI,即使在生产现场的噪音环境下也能进行高精度识别,业内首次※2实现以语音形式下达作业指示。例如在食品工厂,只要向“往饭盒的第1区里装3个炸鸡块”之类的作业项目打声招呼,就能通过简单的指示自动生成机器人动作程序;
◆ 通过将三维传感器检测的图像、测距等周围三维信息和AR(增强现实)技术相结合,可以直观地确认作业动作;
◆ 通过简单作业指示技术和自动优化避障等机器人动作指令的自动生成调整技术,将程序生成、调整所需的时间缩短至过去的十分之一以下※3。
※2 ? 基于2022年本公司调查
※3 ? 基于公司内部试验
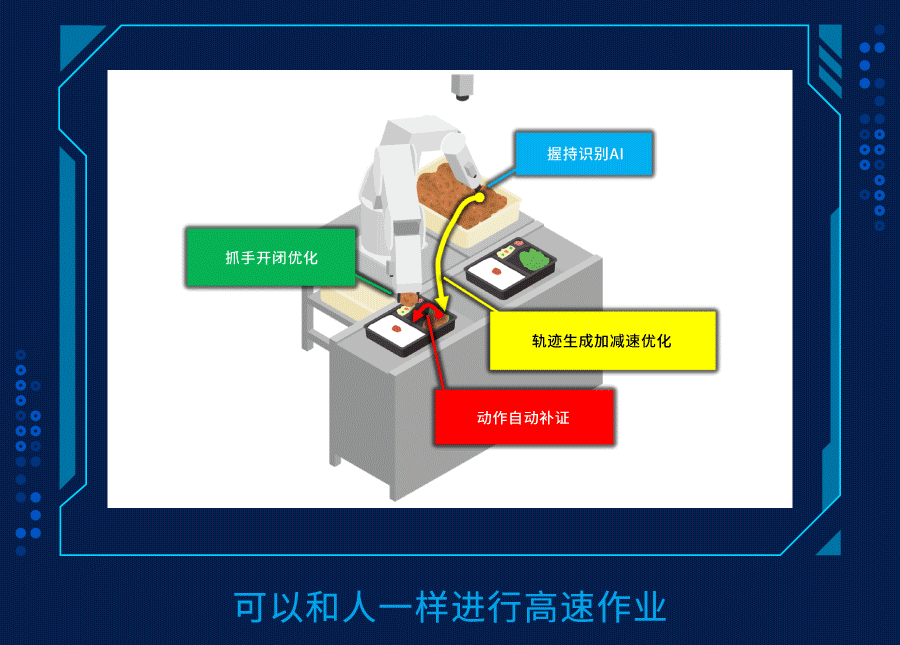
◆ 机器人动作的自动高速化技术,包括轨迹生成技术和加减速优化技术,可自动生成适合作业速度、避障等作业内容的机器人动作指令,实现和人一样的作业速度(每次拾取最短2秒※4);
◆ 自动调整和优化机器人抓手的开合时间,减少机器人停止时的时间浪费;
◆ 此外,通过抓取识别AI和固定在机器人上方的3D视觉传感器,高速识别机器人抓手上物体的位置,自动修正机器人动作。
※4 ? 机器人抓取部件并将其放在指定位置的一个作业所需时间为2秒

为了使机器人用户能够轻松添加功能,在支持机器人软件平台ROS(Robot Operating System)的同时,三菱电机还开发了ROS-Edgecross协作功能,通过“Edgecross※5(边缘交叉)”统一管理ROS及系统内的信息。通过与Edgecross合作,发挥Edgecross的连接性和多供应商性的特长,可以轻松监视和分析整个生产线,提高生产效率和生产质量。
※5 ? 一个协调FA和IT的开放的源自日本的边缘计算领域的软件平台

三菱电机开发的无需示教机器人系统,能够降低成本、提升产能、提高准确率等,将大力推进装盘、分拣等作业工序的自动化进程,助力劳动密集型产业向批量智能化转型。今后,我们将面向实际应用,不断提升所开发技术的性能,并以实例佐以验证,旨在尽早实现产品化。
