常见的车载传感器有哪些?
自动驾驶正成为影响未来行业的关键技术。车载传感器是自动驾驶系统感知外部世界的关键。它们就像车辆“眼耳口鼻”帮助车辆感知外界、听觉和视觉是必不可少的,这些感知的合作性能也直接决定了自动驾驶车辆的安全性。
有哪些常见的车载传感器?
目前,该行业主要使用三种传感器,包括摄像头、激光BQ24001PWPR雷达和毫米波雷达。各种传感器都有自己的优缺点,所以在自动驾驶系统中通常有不同的任务划分。
摄像头可以获得光学图像,并从一定角度准确记录物体的颜色、纹理、颜色分布等信息。因此,一些研究使用相机来完成目标识别和目标跟踪任务,包括道路检测、行人和车辆识别和局部路径规划。为了克服相机可测角度范围窄的问题,自动驾驶系统通常使用多个相机摄像头来全面监控周围环境。
毫米波雷达通过脉冲压缩和多普勒频移测量物体的距离,广泛应用于障碍物检测、行人识别和车辆识别。
激光雷达的主要应用包括定位、障碍物检测和环境重建。由于三维(3D)与二维数据相比,数据具有一定的信息表示优势,可以最大限度地恢复真实环境中的交通条件。结合毫米波雷达目标的动态特性、激光雷达的变化优势和光学图像中目标的细节,综合信息可以帮助车辆执行各种任务,如意图分析、运动规划和自动驾驶。
为什么一定要多传感器融合?
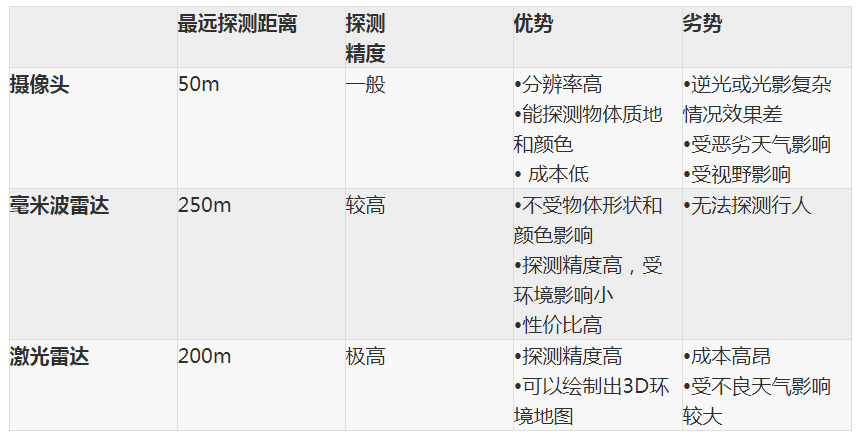
使用多传感器集成技术的主要原因是培养优势,规避弱点,冗余设计,提高汽车的安全系数。多传感器集成系统的功能远远超过这些独立系统的总功能,相当于1+1>2。使用不同类型的传感器可以在所有传感器都有故障的环境中提供额外的冗余。这种错误或故障可能是由自然原因(如浓雾天气)或人为现象(如摄像机或雷达的电子干扰或人为干扰)引起的。每个传感器的优缺点如下:
目前,市场上大多数自动驾驶解决方案都包括摄像头、激光雷达和毫米波雷达,使用相同的系统来收集和处理数据。我们需要统一这些传感器的坐标系统和时钟,以实现三个相同的差异:同一时间,相同的地理坐标,相同的目标出现在不同类型的传感器中。
一定要看到这里,聪明的你才能意识到,这不是一件容易的事情,要实现三同一的差异,就要克服很多挑战。
挑战1:统一时钟
这里要做的就是同步不同传感器的时间戳,这次我们主要介绍两种方法。
GPS时间戳的时间同步方法:在这种方法中,传感器硬件需要支持GPS时间戳,如果支持,传感器输出的数据包将有一个全球时间戳,这些时间戳以戳GPS作为基准,相当于不同的传感器GPS基准相当于使用相同的时钟,而不是传感器各自的时钟。
另一种方法被称为硬同步方法:该方法可以减少搜索时间戳引起的误差。该方法可以将激光雷达作为触发源输出到其他传感器,当激光雷达转向某个角度时,触发该角度的摄像头,大大降低了时差问题。该时间同步方案可以在硬件中实现,可以大大降低同步误差,提高数据同步效果。
挑战2:统一坐标系
统一坐标系有两个步骤,一个是运动补偿,另一个是传感器校准。由于所有的传感器都安装在汽车上,汽车是运动的刚体。因此,当传感器收集数据时,车辆在周期开始时间点和结束时间点处于不同的位置,导致不同时间收集的数据坐标系不同,因此需要根据车身的运动对传感器收集的数据进行运动补偿。
传感器校准分为内部参数校准和外部参数校准。内部参数校准解决了每个传感器与世界坐标系之间的单独变化;外部参数校准是在世界坐标系下解决的不同传感器之间的变化。传感器外部参数校准的精确内部参数校准。
挑战3:融合方法
经过以上步骤,我们可以得到的信息包括:运动补偿和时间同步的传感器源数据、传感器内部参数和传感器外部参数。有了这些信息,我们可以做出相应的集成方法。你到底是怎么做到的?以下是两个例子:
摄像头与激光雷达融合:激光雷达数据包含清晰(x,y,z)数据的3D观过标定参数和摄像头本身的内部参数,多传感器的深度集成可以实现3D点击图像,图像上的一些像素会发布深度信息,帮助感知系统根据图像分割或训练深度学习模型。
毫米波雷达与激光雷达的融合:毫米波雷达与激光雷达的融合相对简单。在笛卡尔坐标系下,它们有完整的(x,y)方向信息。因此,在笛卡尔坐标系下,激光雷达和毫米波雷达可以实现基于距离的集成。此外,毫米波雷达还可以检测到障碍物的速度,激光雷达也可以通过位置跟踪来估计障碍物的速度,并整合这些速度信息可以帮助筛选错误的匹配候选集。
从目前国内自动驾驶策略来看,各种传感器是提高安全冗余的常用途径。这也是多传感器集成硬件的必要环节。
