美国SwRI:开发机器人成像工具使飞机表面处理自动化
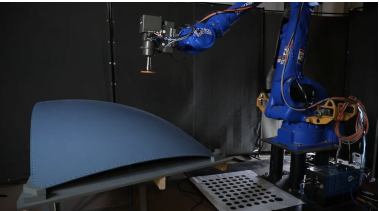
美国西南研究院(SwRI)推出了一种新型的自动化技术,使工业机器人能够对工作进行视觉分类,然后自动执行这些任务。这些任务可以是打磨、喷漆、抛光、清洁、焊接、密封等等。
SwRI的机器人研发经理Matt Robinson说:"我们的解决方案在提高零件质量和减少返工的同时,增加了过程的可重复性。它们还能减少人类对危险环境的暴露。"
SwRI使用自己的机器学习算法和分类软件,能够与Scan-N-Plan和ROS 2(最新版本的开源机器人操作系统)等开源工具协同工作。传统的机器人编程带来了自己的挑战,如需要专家知识和花费大量的额外时间。另一种编程方式是使用Scan-N-Plan,这是一项ROS-Industrial技术,它使用机器视觉扫描零件以创建3D网格数据,供机器人用来规划工具路径和轨迹--同时执行实时过程监控。
Robinson说:"通过利用这些开源工具和我们的定制软件,我们已经开发出一种解决方案,可以对处于不同工作阶段的零件表面的区域和纹理进行智能分类。"
SwRI说:"该解决方案包括定制的机器视觉算法,使机器人能够根据所需的表面工作量,以不同的压力应用许多不同类型的介质。基于特征的处理也是通过利用语义分割方法来实现的,以将正确的工具应用于正确的特征,如切割与打磨。"
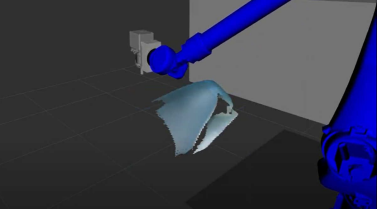
Scan-N-Plan 机器人分类软件
SwRI 制造技术部主任 Paul Evans 说:“这些突破将有助于防止机器人过度打磨或过度研磨金属表面。”
该项目展示了 ROS 2 的高级功能,同时为额外的应用程序构建提供了一个初始框架。它也是一个开源示例,用于教授和培训那些对开发利用 ROS 的高级解决方案感兴趣的人。

Robinson 补充道:“SwRI 很高兴能够提供经过验证的解决方案,利用这个框架为商业和政府工业客户群提供广泛的应用,包括基于固定单元的系统和移动解决方案。”
机载摄像头覆盖地图以创建彩色网格以促进高级处理。2D、3D 和颜色分类的结合推动了更智能的处理。这项新功能将通过 ROS-Industrial 开源程序提供。
